Titelstory aus DLRmagazin 172: Die MMX-Mission wird die Marsmonde erkunden
Kopfüber ins Abenteuer
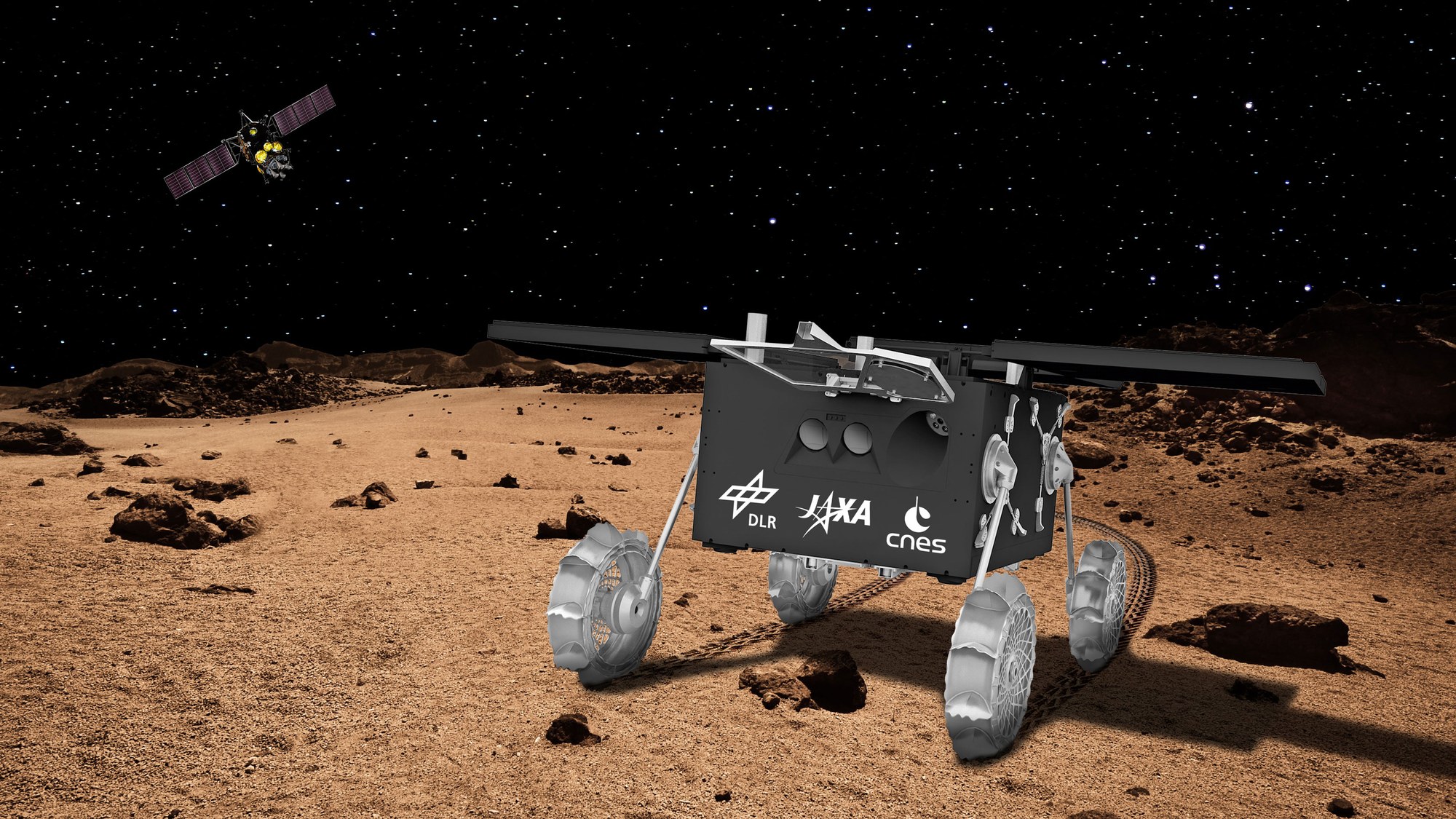
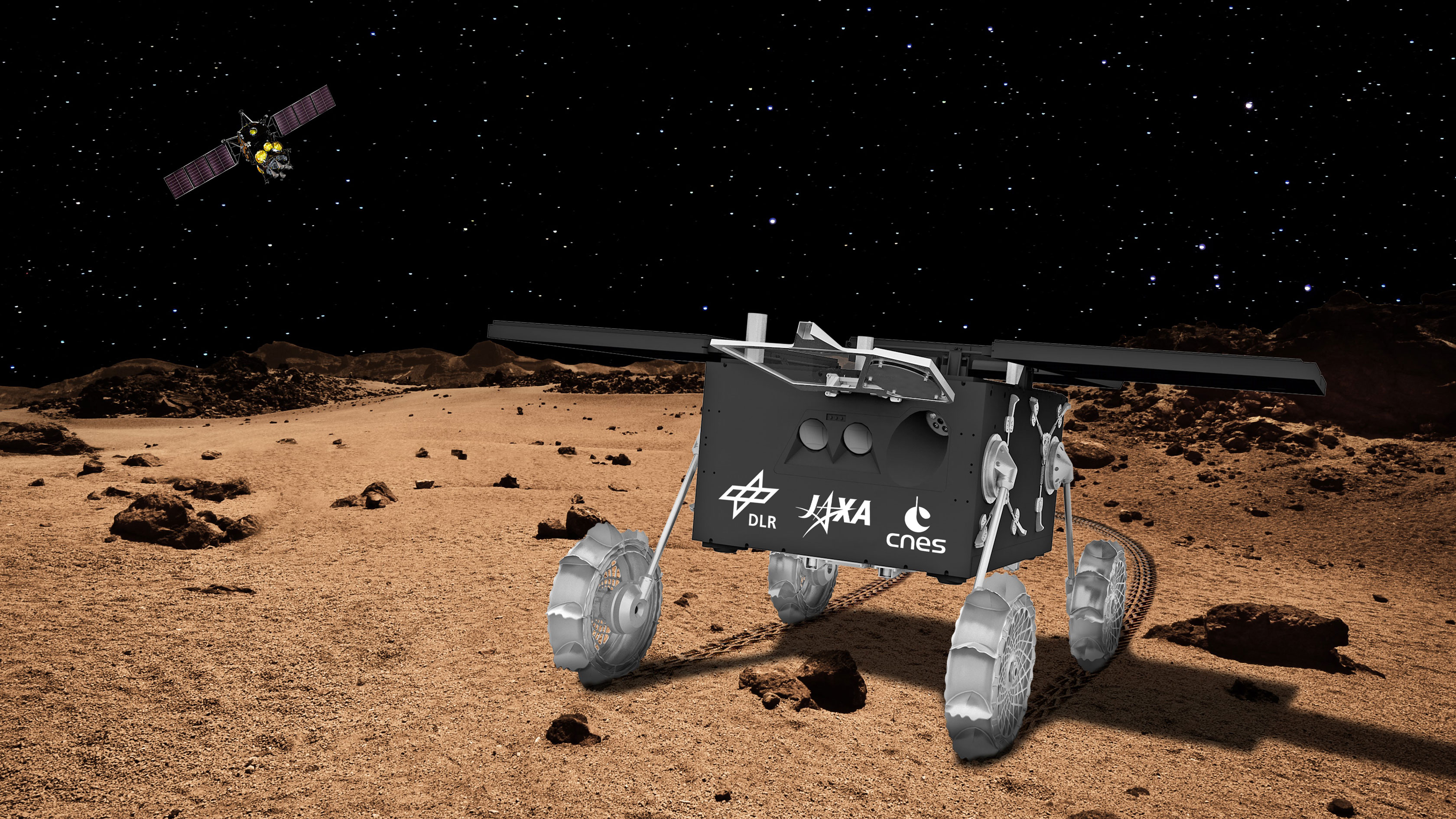
Der MMX-Rover auf dem Marsmond Phobos
Der MMX-Rover ist ein deutsch-französisches Gemeinschaftsprojekt im Rahmen der japanischen Mission Martian Moons eXploration (MMX). An seinem Ziel, auf dem Marsmond Phobos, soll er unter extrem geringer Schwerkraft rollen.
Phobos und Deimos, die beiden Monde des Mars, geben noch viele Rätsel auf. Die Mission MMX (Martian Moons eXploration) der japanischen Raumfahrtagentur JAXA wird in der zweiten Hälfte der 2020er Jahre die beiden Trabanten erkunden, um insbesondere ihre Herkunft zu entschlüsseln. Mit an Bord führt sie einen deutsch-französischen Rover, der in enger Kooperation des DLR mit der französischen Raumfahrtagentur CNES entwickelt, gebaut und betrieben wird. Der MMX-Rover wird sich nach einer Landung im freien Fall auf Phobos, dem größeren der beiden Monde, selbstständig aufrichten. Ist das geschafft, wird er der erste Rover sein, der auf einem kleinen Körper unter extrem geringer Schwerkraft rollt. Die Tests und Vorbereitungen dafür laufen jetzt auf der Erde.
Eine Glasscheibe ähnlich der Größe eines riesigen Flachbildfernsehers gibt den Blick in den Reinraum beim CNES (Centre national d’études spatiales) in Toulouse frei. In der Mitte aufgebaut und umsorgt liegt der gerade einmal 25 Kilogramm leichte MMX-Rover. Noch ohne Solarpanels ist er etwa so groß wie eine Getränkekiste. Die vier filigranen Beine mit den – vergleichsweise großen – Schaufelrädern von sich gestreckt, sieht er schon jetzt, Ende Januar, fast fertiggestellt aus. In den Tagen zuvor wurden die Räder bereits auf ihre Beweglichkeit getestet, ebenso das korrekte Ausklappen der Beine. Zusammen bilden sie das Fortbewegungssystem. Es soll dem Rover später auf dem Marsmond Phobos ermöglichen, sich nach der Landung aus 40 bis 100 Meter freiem Fall in die korrekte Position aufzurichten, egal in welcher Lage die Landung zunächst endet. Auch für die weitere Mission spielt das System eine große Rolle, da es auch das Ausrichten der Solarpanels zur Sonne und die Absenkung des Rovers für wissenschaftliche Messungen ermöglicht.
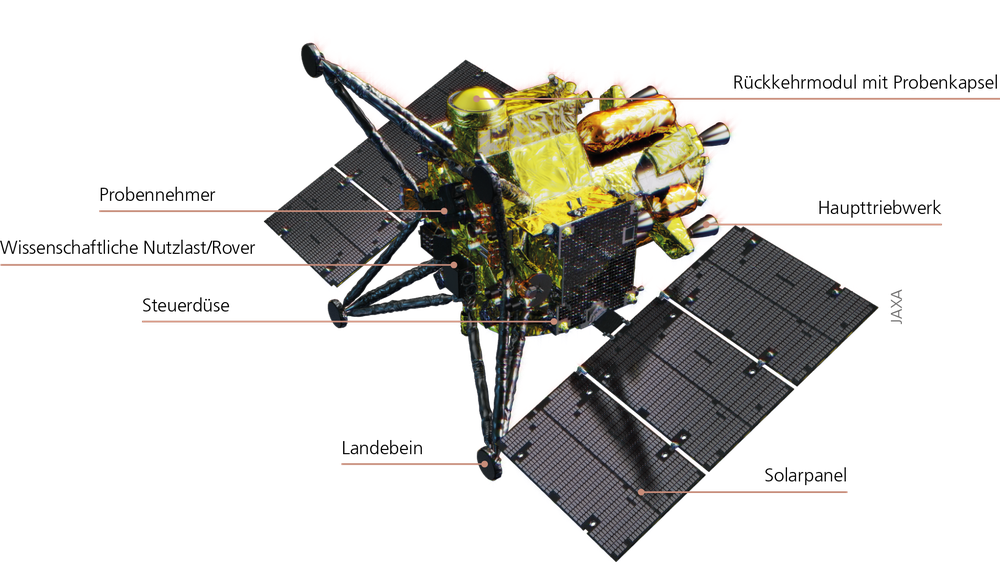
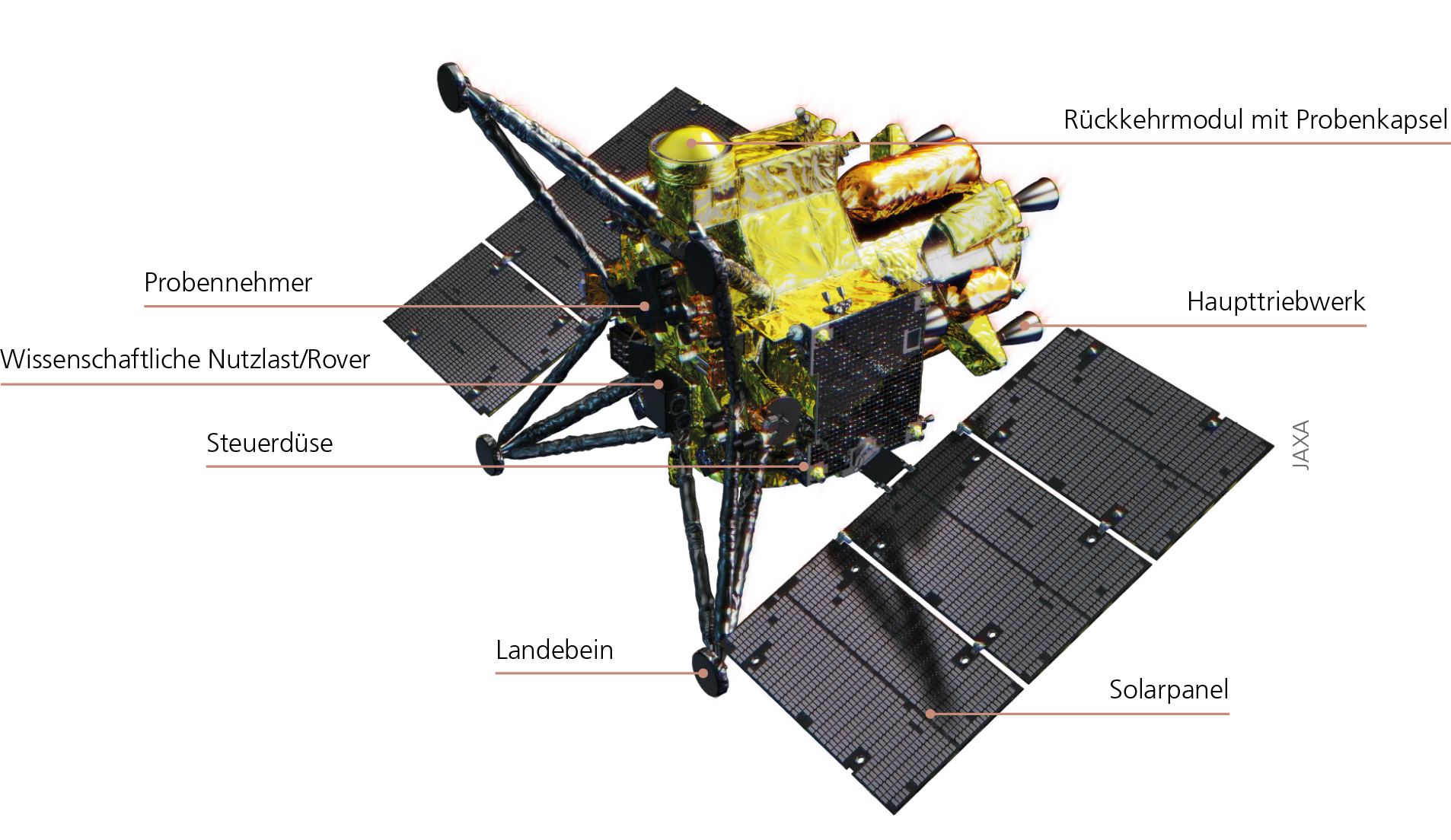
Die MMX-Sonde
MMX ist eine Mission der japanischen JAXA mit Beiträgen von NASA, ESA, CNES und DLR – Start: voraussichtlich September 2024. Sie hat die Aufgabe, die Marsmonde Phobos und Deimos zu charakterisieren sowie zu klären, wie und wo die beiden Trabanten entstanden sind.
Für den irdischen Check seines Bewegungssystems musste der Rover allerdings keine Teststrecke entlangfahren oder sich am Boden aus den verschiedensten Positionen aufrichten. Im Gegenteil – er wurde im Reinraum aufgebockt. Die vier Beine mit ihren Rädern schwebten in der Luft. So wurden diese nicht unnötig belastet. Denn die Schwerkraft der Erde wäre viel zu stark für die filigrane Leichtbaukonstruktion, die am Robotik- und Mechatronikzentrum des DLR für die extrem geringe Gravitation von lediglich einem Zweitausendstel der Erdanziehung auf Phobos erdacht und ausgelegt wurde. Bei den Tests drehten sich die Räder einzeln in der Luft. Die Beine, an deren Ende die Räder sitzen, rotierten jeweils um 400 Grad. Geprobt wurde ebenfalls die Sequenz der Beinbewegungen, die sicherstellt, dass sich der Rover von allein aus jeder Ausgangslage aufrichten kann. Ebenso die Sequenz, die die korrekte Ausrichtung der Solarpanels zur Sonne sicherstellt. Alles klappte – die Bewegungsabläufe, die zuvor bereits simuliert worden waren, funktionierten einwandfrei.
An diesem Freitagnachmittag laufen in Toulouse zudem ganz besondere Tests, zu denen kein Besuch im Reinraum zugelassen ist. Mit speziellen LED-Leuchten erkunden die Ingenieurinnen und Ingenieure die verschiedenen „Shutter“ am Rover – klappbare Scheiben, die die einzelnen Kameras und Instrumente bei der Landung schützen. Nach geglückter Landung sollen sich diese „Schutzfenster“ öffnen. Unmittelbar nach der Landung wird durch eine solche mit Staub verschmutzte Schutzscheibe ein Bild von der Phobos-Oberfläche als Landebestätigung aufgenommen. Wenn sich der Staub gelegt hat, werden die Schutzfenster geöffnet.
Vor dem ersten Bild und bevor der MMX-Rover die ersten Zentimeter auf Phobos zurücklegen kann, wird er bei der Landung sein ganzes Können zeigen müssen: Das MMX-Mutterschiff wird den Rover in einer Höhe von etwa 50 Metern ausklinken. Im langsamen freien Fall schwebt der Rover Phobos entgegen. Die Eigenschaften der Mondoberfläche sind im Detail noch unbekannt, aber es ist wahrscheinlich, dass der Rover mehrmals vom Boden abprallt und sich überschlägt, bevor er schließlich liegenbleibt. Egal in welcher Position dies sein wird, er ist so konstruiert, dass er sich mit den Beinen seines Fortbewegungssystems autonom mit der korrekten Seite nach oben aufrichtet. Dies ist entscheidend, damit er danach seine Solarpanels entfalten, diese zur Sonne hin ausrichten und seine Batterie aufladen kann. Dann kann die Erkundung des Marsmondes Phobos beginnen.
Die Bilder, die uns dann erwarten, werden von insgesamt vier Kameraköpfen bereitgestellt. Zwei Navigationskameras blicken nach vorne und erlauben eine 3D-Darstellung des Terrains vor dem Rover. Mit diesen Bildern können die Wissenschaftlerinnen und Wissenschaftler Hindernisse erkennen und die Fahrtroute detailliert planen. Anhand der 3D-Daten soll der Rover vollautonom vor Hindernissen stoppen oder diese sogar umfahren. Außerdem eignen sich die räumlich hochaufgelösten Bilder sehr gut für geologische Analysen. Die anderen beiden Kameras, genannt „Wheelcams“, befinden sich unter dem Rover. Diese blicken auf die Kontaktbereiche der beiden linken Räder und erfassen Spurtiefe, Profilabdruck und wie beim Fahren das Bodenmaterial bewegt wird. Das erlaubt Rückschlüsse auf die Bodenbeschaffenheit. Die beiden Radkameras können kurze Filmsequenzen aufnehmen, um das Fahrverhalten genau zu analysieren.
Rund 100 Tage soll der Rover auf dem Mond unterwegs sein. Zentimeter für Zentimeter könnte er eine Strecke von bis zu 100 Metern erkunden. Das klingt zunächst nach nicht viel, ist aber aufgrund der durch die Schwerkraft limitierten Fahrgeschwindigkeit eine enorme Herausforderung für das kleine vierrädrige Gefährt. Sicher werden Steine in der Landeumgebung liegen, die aufwändig umfahren werden müssen. Aufgrund der extrem geringen Gravitation wird dies zum Balanceakt. Jedes zu schwungvolle Manöver könnte den Rover abheben lassen – mit unkalkulierbaren Folgen.
Dieser Rover ist Teil der Mission Martian Moons eXploration (MMX). Er wird auf dem Marsmond Phobos landen, um diesen zu erkunden. Rund 100 Tage soll er auf dem Mond unterwegs sein. Nach der Landung wird er aufgrund der geringen Gravitation auf Phobos wahrscheinlich mehrmals vom Boden abprallen und sich überschlagen. Sobald er zum Liegen kommt, muss er sich autonom mithilfe seines Fortbewegungssystems aufrichten und anschließend die Solarpanels entfalten. Ohne Solarpanels ist der MMX-Rover etwa so groß wie eine Getränkekiste.
Video: Der MMX-Rover startet seine Mission
Für die Wiedergabe dieses Videos auf Quickchannel.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
Video: Der MMX-Rover startet seine Mission
Dieser Rover ist Teil der Mission Martian Moons eXploration (MMX). Er wird auf dem Marsmond Phobos landen, um diesen zu erkunden. Rund 100 Tage soll er auf dem Mond unterwegs sein. Nach der Landung wird er aufgrund der geringen Gravitation auf Phobos wahrscheinlich mehrmals vom Boden abprallen und sich überschlagen. Sobald er zum Liegen kommt, muss er sich autonom mithilfe seines Fortbewegungssystems aufrichten und anschließend die Solarpanels entfalten. Ohne Solarpanels ist der MMX-Rover etwa so groß wie eine Getränkekiste.
So wird die Fahrgeschwindigkeit am Anfang weniger als einen Millimeter pro Sekunde betragen, kann aber bei wachsender Erfahrung mit dem Terrain auf rund einen Millimeter pro Sekunde gesteigert werden. Mögliche Bodeneigenschaften und ihre jeweiligen Auswirkungen auf das Fahrverhalten wurden am DLR-Institut für Systemdynamik und Regelungstechnik durch eine eigens entwickelte Physiksimulation vorab analysiert.
Zusätzliche Schwierigkeiten stellen die große Entfernung zum Mars und der komplexe Funkweg über das Mutterschiff dar. Die Signallaufzeit vom Rover über das Mutterschiff zur Erde und zurück wird rund zwei Tage betragen. Entsprechend müssen die Forschungsteams in den beiden Kontrollzentren beim CNES in Toulouse und beim DLR in Köln (am Microgravity User Support Center – MUSC) jeweils Fahrsequenzen programmieren, die der Rover selbstständig ausführen kann. Klappt alles, wird er der weltweit erste Rover auf einem kleinen Körper mit geringer Schwerkraft sein, der zudem eine längere Strecke erkundet. Hinzu kommen andere widrige Bedingungen: Während eines „Phobos-Tages“ von knapp acht Stunden schwankt die Temperatur am Rover zwischen –150 und +50 Grad Celsius. Dieser Temperaturwechsel geschieht dazu noch sehr schnell, denn drei Tage auf Phobos entsprechen einem Tag auf der Erde. Deshalb muss der Rover so konstruiert sein, dass die Temperatur in seinem Inneren in einem verträglichen Bereich gehalten wird, damit die Elektronik geschützt wird.
Neben den Kameras befinden sich auch das am DLR-Institut für Optische Sensorsysteme entwickelte Raman-Spektrometer RAX und das Radiometer miniRAD, das am DLR-Institut für Planetenforschung entwickelt wurde, auf dem Rover. RAX erkundet die mineralogische Zusammensetzung der Oberfläche und miniRAD sammelt Daten für die Analyse der thermischen Eigenschaften. Die Messdaten werden dazu beitragen, die bisher ungeklärte Herkunft der Marsmonde Phobos und Deimos genauer zu beleuchten.
Letzte Tests im Reinraum des DLR in Bremen
Im DLR-Institut für Raumfahrtsysteme wurden vor der Auslieferung nach Toulouse im November 2022 unter anderem Funktionaltests, der Vibrationstest, der Thermal-Vakuum-Test sowie der Test auf die elektromagnetische Verträglichkeit des Rover-Segments durchgeführt.
Integriert sind beide Instrumente neben den Kameras in den Leichtbaukörper (Chassis) des Rovers, der am DLR-Institut für Systemleichtbau entwickelt und hergestellt wurde. Es folgte im vergangenen Jahr die weitere Integration des Chassis beim DLR-Institut für Raumfahrtsysteme in Bremen inklusive der Montage des Fortbewegungssystems. Vor der Auslieferung nach Toulouse im November 2022 erfolgten unter anderem Funktionaltests, der Vibrationstest, der Thermal-Vakuum-Test sowie der Test auf die elektromagnetische Verträglichkeit des Rover-Segments.
Beim CNES in Toulouse folgte der finale Zusammenbau, inklusive der Integration des Energie- und Kommunikationssystems sowie der wissenschaftlichen Instrumente. In Toulouse durchläuft der komplette MMX-Rover dann die finalen Tests zur Weltraumqualifikation. Hierbei ist bereits das Verbindungs- und Separationssystem, genannt „MECSS“ (Mechanical and Electrical Connection and Support System), montiert, welches später den Rover vom Mutterschiff trennt und auf seine Reise zu Phobos schickt. Dieses Subsystem wurde ebenfalls vom DLR entwickelt. Bereits im Sommer 2023 steht die Auslieferung des Flugmodells nach Japan an. Ein straffer Zeitplan, der die Teams beim DLR und beim CNES in den letzten Monaten und Jahren enorm forderte.
Letzte Vorbereitungen vor dem Start
Bei der JAXA (Japan Aerospace Exploration Agency) wird der deutschfranzösische Rover schließlich in die MMX-Muttersonde eingebaut. Genauer gesagt wird der Rover in das Explorationsmodul der Raumsonde integriert, welches selbst mit verschiedenen Instrumenten und sogar Landebeinen ausgestattet ist, um im Verlauf der MMX-Mission, nahe der Landestelle des Rovers, Proben des Mondes zu entnehmen. Das Rückkehrmodul bringt die Proben am Ende der Mission 2029 zurück zur Erde. Die MMX-Mission wird voraussichtlich 2024 mit einer H3-Rakete vom Weltraumbahnhof in Tanegashima starten. Dann stehen Mars und Erde das nächste Mal günstig für einen Flug. Zuvor muss jedoch die gesamte MMX-Sonde samt Rover noch einmal die Tests zur Weltraumqualifikation durchlaufen, bei denen ihre Beständigkeit gegenüber den Vibrationen des Starts, der Hitze und Kälte im Weltraum sowie dem dort herrschenden Vakuum erprobt wird.
Auch an jenem Freitag Ende Januar in Toulouse ist mit der Begeisterung des Teams zu spüren, dass der Start zum Mars und zu seinen Monden immer näher rückt. Die Beine samt Rädern werden wieder in die Startkonfiguration zurückversetzt. Eng an den Rover angeschmiegt sind sie sicher verriegelt. Diese Position werden sie nun halten, bis das Abenteuer auf Phobos beginnt …
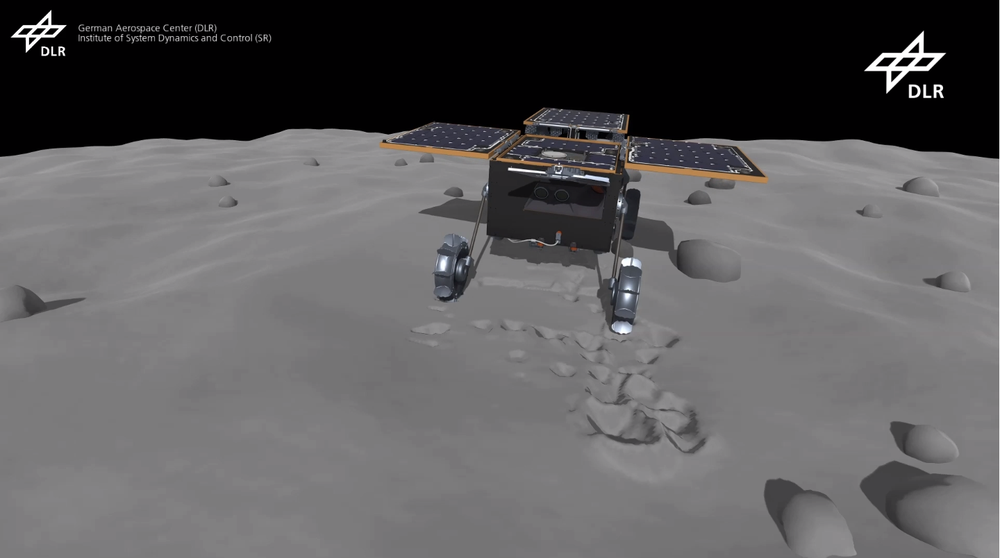
MMX-Rover: Sequenz zum Aufrichten und Entfalten der Solarpanels
Der Rover wird aus einer Höhe von etwa 50 Metern vom Explorationsmodul abgekoppelt und fällt dann langsam zur Oberfläche. Dort angekommen wird er bei der Landung unbeschadet mehrere „Purzelbäume“ schlagen und in unvorhersagbarer Lage zum Liegen kommen Aus dieser Situation heraus muss er sich autonom mithilfe des Fortbewegungssystems aufrichten und anschließend seine Solarpanels entfalten. Erst dann ist der Rover fahrbereit und „überlebensfähig“ .
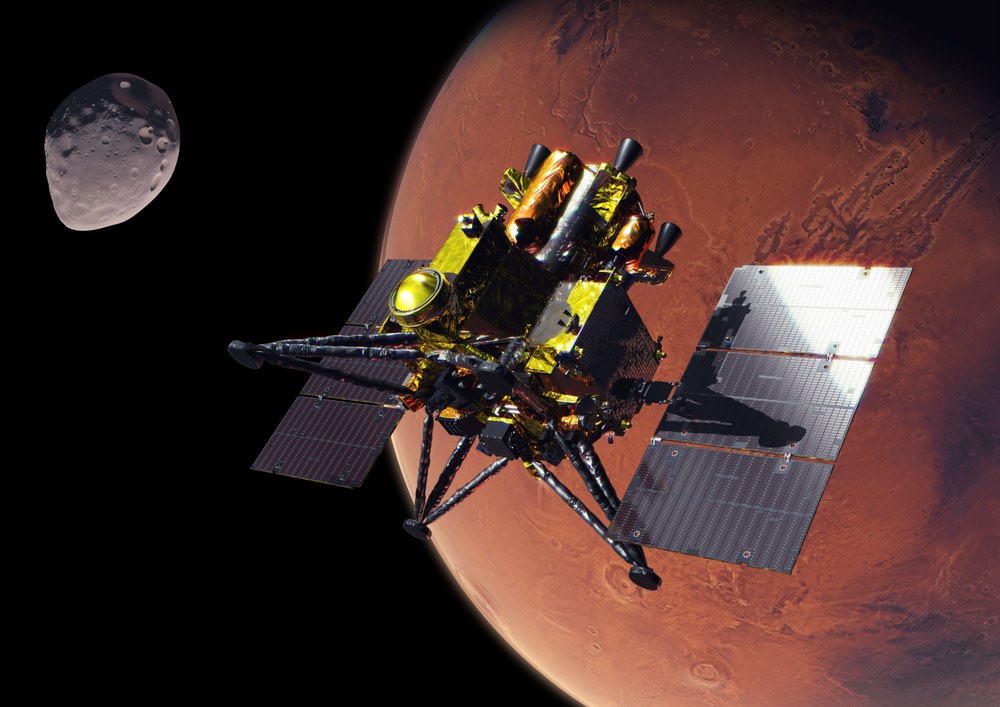
Die Mission MMX (Martian Moons eXploration) der japanischen Raumfahrtagentur JAXA, die voraussichtlich 2024 starten wird, soll die Lösung liefern. Dafür wird sie erstmals einen Rover und ein Probenrückholmodul auf dem Marsmond Phobos absetzen.
MMX ist eine Mission der japanischen JAXA mit Beiträgen von NASA, ESA, CNES und DLR – Start: voraussichtlich September 2024, dann Ankunft beim Mars: August 2025. Sie hat die Aufgabe, die Marsmonde Phobos und Deimos zu charakterisieren sowie zu klären, wie und wo die beiden Trabanten entstanden sind. Mit an Bord ist ein mobiler Rover. Er hat knapp 25 Kilogramm Masse sowie vier Kilogramm dazugehöriger Komponenten auf dem Mutterschiff und ist ein gemeinsames Projekt von CNES und DLR. Seitens des DLR sind unter der Leitung des Instituts für Robotik und Mechatronik auch die Institute für Raumfahrtsysteme, für Softwaretechnologie, für Systemleichtbau, für Systemdynamik und Regelungstechnik, für Optische Sensorsysteme, für Planetenforschung sowie die Einrichtung Raumflugbetrieb und Astronautentraining mit dem Nutzerzentrum für Weltraumexperimente (MUSC – Microgravity User Support Center) beteiligt. Der Rover wird die geologischen, physikalischen und mineralogischen Eigenschaften der Oberfläche von Phobos untersuchen und die Mobilität bei niedriger Schwerkraft demonstrieren. Die Daten dienen auch zur Eichung der Orbiter-Messungen und werden die Landung des Explorationsmoduls unterstützen. Der Datenaustausch mit der Erde erfolgt über den Orbiter. Der Betrieb des Rovers wird von den Kontrollzentren des CNES in Toulouse und des DLR in Köln (MUSC) gesteuert.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}