
Automatica 2012
Das Robotik und Mechatronik Zentrum (RMC) präsentiert sich auch dieses Jahr wieder auf der Automatica. Brandneue Forschungsergebnisse und Entwicklungen im Bereich Automation und Robotik, Technologietrends und die Robotersysteme von morgen sind am Stand des RMC für den Fachbesucher erfahrbar. Unterstützt wird das RMC von seinen Ausgründungen, die die Erfolge im Technologietransfer nicht nur für Mittelstand eindrucksvoll untermauern.
Die folgenden Exponate sind auf der Automatica auf dem Gelände der Neuen Messe München in Halle B3/Stand 520 vom 22. bis 25. Mai 2012 täglich von 09:00 bis 17:00 zu sehen.
- Sensorkonzepte für die Chirurgierobotik
- Humanoide Gehmaschine
- Human-centered Robotics
- Hand Arm System
- Agile Justin
- Telepräsente Wartung und Reparatur
- Multifunktionale Zelle des ZLP
- DEXHAND – weltraumqualifizierbare Mehrfingerhand
- Steifer Kraft-/Momentensensor – FTS-100
- Multi-Sensornavigationssystem IPS
- Brain-controlled robotics
- DLR-HIT Fünf-Finger-Hand
- RoboDrive Hochleistungs-Servomotoren
- Raumfahrttechnologie für die Industrie
- DUALIS MedTech
Sensorkonzepte für die Chirurgierobotik


In der Chirurgierobotik ist die Verbesserung der Immersion des Chirurgen durch haptische und visuelle Rückmeldung ein wesentliches Ziel. Über in Instrumenten integrierte Sensoren werden die benötigten Informationen erfasst und verarbeitet. Während bei der Ermittlung der Kräfte und Momente Dehnungsmessstreifen und faseroptischen Sensoren verwendet werden, erfolgt mit Hilfe von Doppler-Ultra-Schallsensoren die Palpierung von im Gewebe liegenden Gefäßen. Die Darstellung der Rückmeldungen an den Chirurgen kann sowohl visuell z. B. in Form von Steifigkeitskarten oder Kraftpfeilen als auch haptisch über das rücktreibbare Eingabegerät erfolgen. Eine Alternative zu mechanischen Eingabegeräten sind handgehaltene 6D-Eingabegeräte, deren Bewegung optisch registriert wird. Durch Fusion von optischen und initialen Messdaten können beliebige 6D-Bewegungen in Echtzeit erfasst werden, die zur Steuerung des Systems verwendet werden. Bei einer komplizierten Operation, wie z. B. minimal invasive Operationen am schlagenden Herzen, ist eine Bewegungskompensation durch das Chirurgiesystem nötig.

Humanoide Gehmaschine
Der Zweibeinige Roboter des DLR wurde zu einer Forschungsplattform für Humanoide Robotik weiterentwickelt und wird erstmals der Öffentlichkeit auf der AUTOMATICA vorgestellt. Die Entwicklungen zur Gesamtkörper-Drehmomentenregelung werden auf dem System anhand von Gehbewegungen, Gesamtkörperbewegungen und Mehrkontaktsituationen präsentiert.
Human-centered Robotics

Die neuesten Forschungsergebnisse in der physischen Mensch-Roboter-Interaktion zeigen, dass Mensch und Roboter aktiv und sicher einen gemeinsamen Arbeitsplatz teilen können.
Zentrale Aspekte sind dabei Sicherheit und intuitive Interaktion.
Um die Kommunikation zwischen Mensch und Roboter reibungslos und die Bedienung des Systems benutzerfreundlich zu gestalten, werden selbsterklärende Kommunikations- und Interaktionsstrukturen geschaffen.
Dabei zielen die Entwicklungen sowohl auf industrielle Szenarien zwischen Mensch und Co-Worker als auch auf Serviceszenarien in Krankenhäusern ab, in denen medizinisches Personal und der Roboter bei alltäglichen Aufgaben interagieren. Auf der AUTOMATICA zeigt das DLR einen ersten Prototypen, der die genannten neuen Ansätze beispielhaft darstellt. Das Robotersystem baut – angeleitet durch die Messebesucher – ein Schienensystem auf und lässt einen Zug auf der Strecke fahren. Bei der Programmierung der Aufgabe kann der Mensch direkt mit dem Roboter interagieren, ohne auf Tastatur oder Touchpanel zurückgreifen zu müssen.
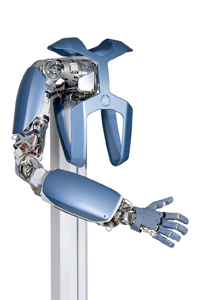
Hand Arm System
Mechanische Robustheit und natürliche, hoch dynamische Bewegungen zeigt das anthropomorphe Hand Arm System. Das Robotersystem ist ein vom menschlichen Vorbild inspirierter Ansatz für die direkte physische Interaktion mit dem Menschen, bestehend aus einer Fünf-Fingerhand mit 19 Freiheitsgraden und einem Arm mit 7 Freiheitsgraden. Mit seinen mechanischen Federn in allen 26 Freiheitsgraden können Kollisionen mit der Umgebung abgemildert werden wodurch Schäden am Roboter und seiner Umgebung vermieden werden können.Weiterhin können die Federelemente als Energiespeicher genutzt werden und so hochdynamische Bewegungen bei gleichzeitig geringem Energieverbrauch ermöglichen. Durch die Federn in den Gelenken entstehen natürlich wirkende Bewegungen, die sich in Applikationen wie Ballwerfen, Zeichnen, Manipulation von Objekten oder taktiler Erkundung verdeutlichen.

Agile Justin
Agile Justin ist ein neues, auf flinke Ganzkörperbewegungen hin optimiertes Mitglied der auf DLR-Leichtbautechnologie basierenden Familie von humanoiden Robotern. Alle seine 51 Freiheitsgrade – vom Rad bis zu den Fingerspitzen – können zeitlich präzise auf Drehmomentebene ngesteuert werden. In Kombination mit einem schnellen Bewegungsplaner und dem engen Zusammenspiel aller Komponenten durch eine neue Version der echtzeitfähigen Software-Middleware aRD kann Agile Justin feinabgestimmte komplexe Bewegungsabläufe ausführen. Diese Fähigkeiten zeigt er beispielhaft beim Fangen und wieder Zurückwerfen von Bällen. Ein Vorläufer des Systems wurde bereits mit der Nominierung für den ICRA Best Video Award 2011 ausgezeichnet.
Telepräsente Wartung und Reparatur

Ausgehend von der Forschung mit teleoperierten Raumfahrtrobotern wird ein industrienahes Szenario für Inspektion, Wartung und Reparatur in gefährlichen oder für den Menschen schwer zugänglichen Industrieanlagen präsentiert. Die multimodale (Sehen, Hören, Fühlen) Mensch-System Schnittstelle erlaubt es einem Operator aus sicherer Entfernung,intuitiv einen Roboter fernzusteuern und dessen Sensorsignale wahrzunehmen. Herausragend, neben dem dreidimensionalen Bild, ist die beidhändige Kraftrückkopplung, mit welcher der Bediener die Interaktionskräfte so spüren kann, als würde er an Stelle des Roboters die Aufgaben vor Ort selbst durchführen. Damit kann der Operator, wie bereits in Weltraumexperimenten erfolgreich gezeigt, komplexe Aufgaben in der entfernten Umgebung ausführen. Der Teleoperator ist der humanoide Oberkörper SpaceJustin des DLR, ausgestattet mit 47 Bewegungsfreiheitsgraden sowie Kraft- und Bildsensorik. Mit seinen Händen kann er alltägliche Bauteile und Werkzeuge greifen und bedienen. Seine teilautonomen Zusatzfunktionen, wie automatische Szenenanalyse oder die Wiederholung von Handhabungen unterstützt der Roboter den Menschen bei der Durchführung seiner Aufgaben.
Multifunktionale Zelle des ZLP

Das Zentrum für Leichtbauproduktion (ZLP) des DLR in Augsburg baut im Industrie- und Wissenschaftsumfeld der Aerospace Area Augsburg gezielt das Forschungsfeld Produktionstechnologie für CFK-Leichtbaustrukturen auf. Mit den resultierenden wissenschaftlichen Kompetenzen leistet das ZLP als Partner der Industrie einen essentiellen Beitrag zum Ausbau der Wertschöpfung im Bereich der CFK-Primärstrukturen. Im ZLP wird eine Technikumsanlage aufgebaut, die der Erforschung und Weiterentwicklung von vollautomatischen Fertigungsprozessen und Erprobung von Endeffektoren im Bereich der Faserverbundtechnik dient. Für die Entwicklung modellbasierter Bahnplanungsalgorithmen und die systemdynamische Analyse von Positioniergenauigkeit und Schwingungsverhalten der Technikumsanlage im hochdynamischen und kooperativen Betrieb wurde ein systemdynamisches Gesamtmodell bestehend aus allen relevanten Teilsystemen entwickelt.
DEXHAND – weltraumqualifizierbare Mehrfingerhand
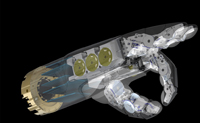
Im Auftrag der ESA entwickelte das DLR eine raumfahrqualifizierbare 4-Fingerhand, die zukünftig Astronauten bei ihren Arbeiten im freien Weltraum unterstützen soll. Die geforderte Leistung bezüglich Greifkraft und Bewegungsgeschwindigkeit sowie die geforderte kleine Baugröße stellen eine besondere Herausforderung an das Design und das Thermalsystem der Hand dar. Die Hand kann im Automatikbetrieb und über einen Datenhandschuh mit Kraftrückmeldung betrieben werden
Steifer Kraft-/Momentensensor – FTS-100

Durch den Einsatz von Kraft-/Momentensensoren wie den FTS-100 kann ein Roboter feinfühliger seine Aufgaben beim Montieren, Kleben, Schleifen oder Polieren ausführen. Der FTS-100 Sensor basiert auf einen monolithischen Stahlmesskörper („aus einem Stück gefertigt“), der nach einer patentierten Anordnung mit Dehnungsmessstreifen (DMS) beklebt ist. Der Stahlmesskörper erlaubt die Messung von Kräften (Fx,Fy,Fz bis 800N) und Momenten (Mx,My,Mz bis 80Nm) mit hoher Genauigkeit. Die analoge und digitale Signalverarbeitung der Messwerte erfolgt auf zwei getrennten Elektronikplatinen, die vollständig im Sensor untergebracht sind. Ein Standard Netzwerkkabel (PoE – Power over EtherCAT) versorgt die interne Elektronik (netX50 Prozessor) und gewährleistet die echtzeitfähige EtherCAT Kommunikation. Die Messdatenauswertung ist mit einer maximalen Frequenz von 5 kHz möglich. Durch die kompakte Bauform, lässt sich der komplette Sensor in einem Zylinder mit einem Durchmesser von 101mm und einer Höhe von 40mm, bei einem Gewicht von 1.3kg, unterbringen.
Multi-Sensornavigationssystem IPS

IPS (Integriertes Positionierungssystem) ist ein System zur Positions- und Lagemessung in unbekannter Umgebung (Innen- und Außenbereich). Es basiert auf einem Multisensoransatz, der es gestattet, die sechs Freiheitsgrade der Eigenbewegung eines Objektes robust und zuverlässig zu erfassen und bereitzustellen. Die Daten der unterschiedlichen Sensoren werden zeitlich referenziert und von einem integrierten Rechner in Echtzeit weiterverarbeitet. Bei Verfügbarkeit wird das System über GNSS gestützt. Das ermöglicht die Einbettung der lokalen Navigationslösung in ein globales räumliches und zeitliches Referenzsystem.
Auf der AUTOMATICA wird eine weiterentwickelte und miniaturisierte Version des Systems erstmalig vorgestellt.
Brain-controlled robotics
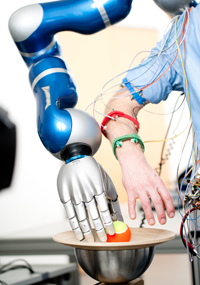
Die Benutzung von Roboterassistenzsystemen durch querschnittsgelähmte Patienten (siehe auch www.brml.de) wird mit Hilfe von neuen DLR-Technologien ermöglicht. In einem einzigartigen Experiment hat das DLR, in einer Kooperation mit Partnern in den USA, einer Patientin ermöglicht einen DLR-Leichtbauroboter mit Gedanken zu steuern, um beispielsweise selber wieder trinken zu können. Unsere neuartigen Lernmethoden setzen wir auch für robotergestützte Rehabilitation ein: gezeigt wird wie die Messung von Muskelaktivitäten ausreicht einen Roboter samt Hand zu steuern, um hochgenau und agil bewegen und greifen zu können.
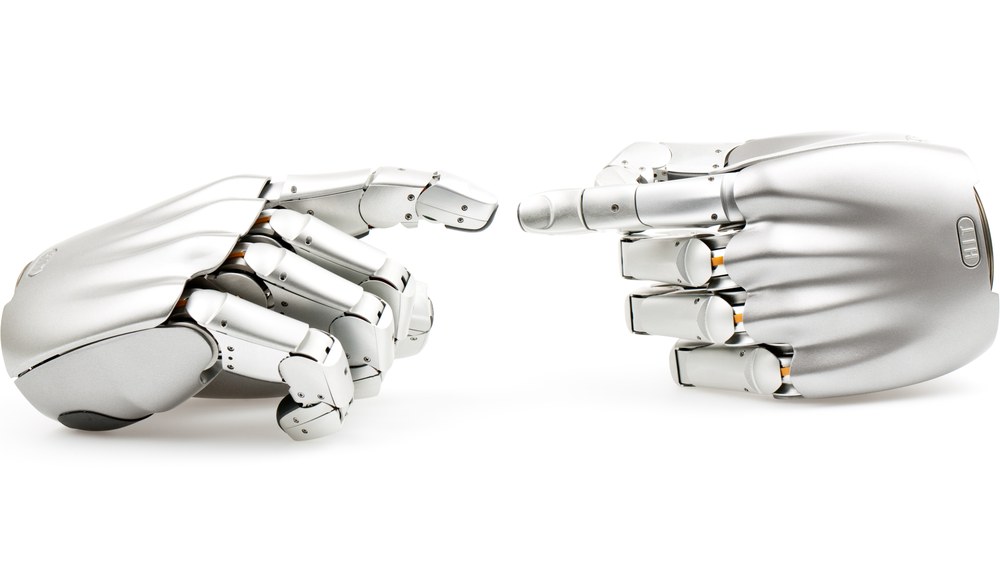
DLR-HIT Fünf-Finger-Hand
{kind=link}
{kind=link}
{kind=link}
Auf Basis der DLR-Hand II haben Wissenschaftler des DLR und des Harbin Institute of Technology (HIT) gemeinsam eine multisensorielle Roboterhand entwickelt. Die hier vorgestellte DLR-HIT-Hand ist eine Weiterentwicklung der DLR-Hand II, welche weltweit anerkannt und in technischer Hinsicht führend ist. Die jetzt kommerziell verfügbare DLR-HIT Fünf-Finger-Hand stellt eine viel versprechende Basis für zukünftige multisensorielle Roboterhände dar.
RoboDrive Hochleistungs-Servomotoren

Das junge und innovative Unternehmen RoboDrive vertreibt und entwickelt Leichtbau-Torque-Servo-Motoren für verschiedenste Anwendungen. Die Antriebe stammen ursprünglich aus der Leichtbau-Roboter-Entwicklung des RMC und sind deshalb insbesondere für Anwendungen geeignet, bei der hohe Leistungsdichte gepaart mit äußerster Präzision und Dynamik von Nöten sind.
Raumfahrttechnologie für die Industrie

Die Firma SENSODRIVE GmbH ist ein Spinoff-Unternehmen aus dem Deutschen Zentrum für Luft- und Raumfahrt. SENSODRIVE hat sich zum Ziel gesetzt, die neuesten Entwicklungen der Antriebstechnik in Produkte umzusetzen. Eigene und kundenspezifische Produkte, entwickelt mit den modernsten Methoden des Concurrent engineering und dem Weitblick der Mechatronik, sind die Spezialität der Firma. Als Systemlieferant mit höchstem Anspruch an Innovation und Qualität zählen Hersteller aus den Bereichen Raumfahrt, Medizintechnik, Simulatortechnik bis zur Fahrzeugtechnik zu den Kunden.
DUALIS MedTech

Die Basistechnologie MedBase nutzt das Prinzip der induktiven Kopplung und ermöglicht die kabellose Übertragung von Energie und Daten zum Betrieb intelligenter Implantate im Körperinneren. Durch unterschiedliche Auslegungen der Technologie kann ein Energiespektrum von μWatt bis ca. 20 Watt abgedeckt werden. Der modulare Aufbau ermöglicht zudem eine effiziente Anpassung und Integration der Technologie.