
Impressionen von der ILA 2014


{kind=link}
Das Institut für Robotik und Mechatronik war auf der ILA Berlin Air Show vom 20.05.2014 bis 25.05.2014 mit drei Exponaten auf dem DLR-Stand (Standnr. 4301) und dem Space-Pavillon (Standnr. 4000) in Halle B4 vertreten.
Im Space-Pavillon war neben TORO auch die Lightweight Rover Unit (LRU) zu sehen.
Am Mittwoch wurde im Bereich der Weltraumrobotik ein bereits bestehendes Memorandum of Understanding um weitere drei Jahre verlängert.
TORO im Space Pavillon

{kind=link}
Roboter mit Beinen stellen wegen ihrer geringen Standfläche insbesondere in unebenem Gelände und der Möglichkeit, über Hindernisse hinwegzusteigen, eine interessante Alternative zu radbasierten Systemen dar. Der humanoide Roboter TORO (TOrque controlled humanoid RObot) des DLR verfügt über die Antriebstechnologie des DLR-Leichtbauarms und hat in sämtlichen Gelenken der Arme und Beine Drehmoment-Sensoren. Damit kann TORO mit seiner nachgiebigen Regelung im Gegensatz zu klassischen positionsbasierten Verfahren sensitiv auf Kräfte in seiner Umgebung reagieren. Neben der Gleichgewichts- und Gangstabilisierung interessiert die Wissenschaftler auch die physikalische Interaktion von TORO über seine Arme und Beine.
Lightweight Rover Unit (LRU) im Space Pavillon

{kind=link}
Die Lightweight Rover Unit (LRU) des DLR ist der Prototyp eines teilautonomen Roboters zur Exploration von Mond oder Mars. Er kombiniert eine Vielzahl modernster Technologien, die am Institut für Robotik und Mechatronik entwickelt wurden, wie z.B. die Antriebs- und Lenkeinheiten, deren Motoren schon im ROKVISS-Experiment fünf Jahre lang auf der ISS ihre Weltraumtauglichkeit unter Beweis stellen konnten. Eine Stereokamera und das mehrfach ausgezeichnete Semi-Global Matching Stereoverfahren verleihen dem Roboter die Fähigkeit, seine Umgebung in 3D wahrzunehmen. Hieraus berechnet der Rover Umgebungskarten und steuert dann autonom in unbekanntem und unebenem Gelände vordefinierte Ziele an. Diese selbstständige Navigation ist wichtig, da Signale von der Erde viele Sekunden oder Minuten benötigen und eine direkte Fernsteuerung erschweren.
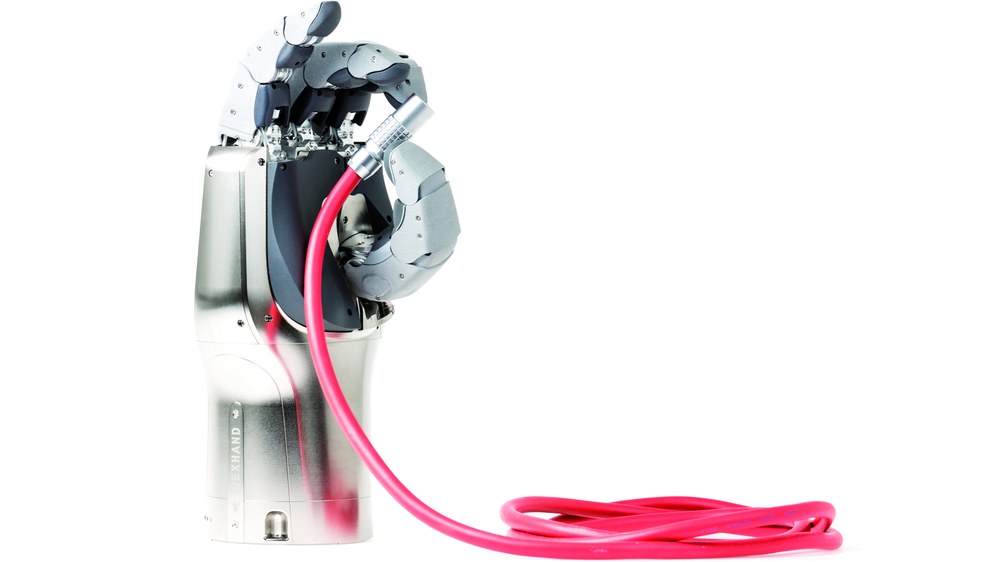
DEXHAND auf dem DLR-Stand
{kind=link}
Möglichst kompakt und zugleich leicht und feinfühlig – die Anforderungen an eine Roboterhand für den Weltraum sind hoch. Zugleich muss sie aber auch den harschen Bedingungen wie Vakuum, radioaktive Strahlung oder auch Schockbelastungen standhalten. Soll zudem in Zukunft einmal ein vom Boden aus gesteuertes robotisches System Aufgaben auf der Internationalen Raumstation ISS übernehmen, muss die Roboterhand auch noch menschenähnlich sein – nur so kann sie für eine menschliche Hand entwickelte Werkzeuge und Ausrüstung bedienen. Die DEXHAND des DLR hat daher die Größe eines Handschuhs, wie ihn die Astronauten bei ihren Außenbordeinsätzen tragen. Für den Bediener, der per Telemanipulation – per Fernsteuerung – die Roboterhand einsetzt, ist dabei aber vor allem eines wichtig: Die Hand muss sich intuitiv steuern lassen, damit die Trainingszeit kurz bleibt.