
Rapid Control Prototyping in einer HiL-Optimierungsumgebung
Da das Hauptziel der Steuerungsingenieure im Bereich der Industrieroboter im Wesentlichen darin besteht, die Geschwindigkeit und Genauigkeit der behandelten Struktur zu verbessern, werden immer leistungsfähigere Systeme für den Entwurfs- und Optimierungsprozess entwickelt. In unserer Steuerungsabteilung wird das Rapid Control Prototyping einerseits mit Simulationsprogrammen wie MODELICA/DYMOLA und andererseits mit Optimierungstools wie MOPS (Multi-Objective Parameter Synthesis) in der Echtzeitumgebung Matlab-xPC durchgeführt. Der Begriff "Rapid Control Prototyping" steht dabei für die schnelle und effiziente Entwicklung von Regelungsaufgaben, beginnend bei der Modellbildung und endend bei der Hardware-in-the-Loop (Hil) Optimierung der entworfenen Reglerstruktur.
Da die manuelle Abstimmung von Reglerparametern zur Erreichung von Hochleistungsreglern sehr zeitaufwändig ist, wurde dieses HiL (Hardware in the Loop)-Setup entwickelt. Anhand verschiedener Kriterien (z.B. Überschwingen, Einschwingzeit oder Positionsfehler), die aus den Messdaten berechnet werden können, können viele verschiedene, oft widersprüchliche Anforderungen berücksichtigt werden. Die Optimierungstechnologie für diesen automatischen Prozess ist das oben erwähnte, Matlab-basierte Programm MOPS, das ursprünglich am DLR für fortgeschrittene robuste Flugsteuerungsprobleme entwickelt wurde.
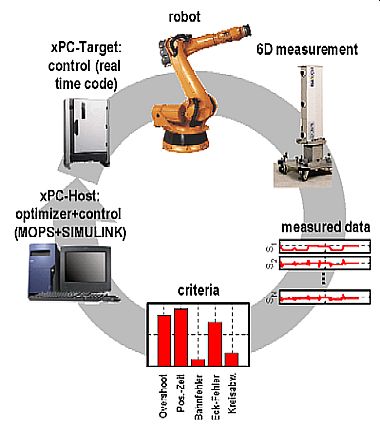

Der Versuchsaufbau ist in der Abbildung schematisch dargestellt. Auf der Grundlage der oben beschriebenen Komponenten läuft ein Optimierungszyklus wie folgt ab:
Ein SIMULINK-Modell - SIMULINK ist eine grafische Toolbox des Simulationspakets Matlab - des Controllers in Kombination mit dem Optimierer läuft auf dem xPC-Host. Der automatisch aus Matlab generierte Echtzeitcode des Controllers wird an das xPC-Target in der Steuereinheit des Roboters gesendet. Parallel zur Bewegung des Roboters misst eine 6-Grad-Kamera die Position und Orientierung z.B. des Roboterflansches. Diese Daten werden vom xPC-Host eingelesen und anschließend berechnet der Optimierer die oben genannten Kriterien sowie neue Steuerungsparameter, die in Echtzeit an das xPC-Target zurückgesendet werden.
Dadurch wird sichergestellt, dass Kontrollingenieure ihre entworfenen Strukturen auf sehr effiziente Weise testen können.