
ROKVISS-Ergebnisse
Erfolgreiche Premiere – Deutscher Roboterarm beendet seine fünfjährige ISS-Mission
Deutschlands erstes Experiment in der Weltraumrobotik ist nun zu Ende gegangen. Am Abend des 15. November 2010 entfernten zwei russische Kosmonauten bei einem Weltraumspaziergang den vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) entwickelten Roboterarm ROKVISS von der Experimentierplattform auf dem russischen Servicemodul Svezda und brachten ihn ins Innere der ISS. Am 2. November 2010 hatte das ROKVISS-Team vom DLR-Zentrum für Robotik und Mechatronik in Oberpfaffenhofen den Roboterarm in die für diese Operation erforderliche Position gebracht. Nur in dieser Position konnte ROKVISS problemlos durch die Luftschleuse in das Innere der ISS transportiert werden.
Das Technologieexperiment wurde entweder vollautomatisch oder mittels einer als Telepräsenzbetrieb bekannten Technik – der Fernsteuerung durch das in Oberpfaffenhofen ansässige DLR-Projektteam Rokviss – gesteuert. Vier- bis sechsmal im Monat nahmen die Forscher Kontakt mit dem Roboterarm auf, wenn die ISS den Empfangsbereich der Antennenanlage in der DLR-Einrichtung in Weilheim bei Oberpfaffenhofen überflog und so die Übertragung von Daten ermöglichte. Die Datenübertragung erfolgte über eine spezielle Kommunikationseinheit (CUP = Communication Unit for Payloads). Dieses System ermöglichte es dem Team, den ROKVISS im Force-Feedback-Modus (Telepräsenz) mit einer Hin- und Rücklaufzeit von weniger als 30 ms zu betreiben. Das System wurde von der STT-Systemtechnik GmbH entwickelt und hergestellt. Das CUP wurde nicht von der ISS abmontiert, es wird für kommende Experimente verwendet.
Ziel des Experiments war es, neue Hardware und leistungsfähige Robotersteuerungskonzepte während echter Missionseinsätze zu testen und zu verifizieren. In Zukunft wird diese Technologie die Astronauten unterstützen und ihnen die Arbeit bei komplexen Aufgaben erleichtern und auch bei der Reparatur von Satelliten im Orbit helfen. Die Bedingungen im Weltraum unterscheiden sich grundlegend von denen auf der Erde. Es gibt keine Luft und die Temperaturen im Inneren der Robotergelenke reichen von minus 20 bis plus 60 Grad Celsius.
Mit der Entfernung von Rokviss von der ISS ist die Arbeit der DLR-Forscher jedoch noch nicht beendet. Bis März 2011 sollen die beiden Gelenkeinheiten von ihrer Grundplatte gelöst werden und auch die Kameraeinheit soll demontiert werden. Nur so passen die Gelenke in den kleinen Stauraum der Sojus-Kapsel, in der sie zur Erde zurückgebracht werden sollen. Mitte Juni 2011 erwarten Projektleiter Klaus Landzettel und seine Kollegen, dass Rokviss wieder im DLR-Zentrum für Robotik und Mechatronik in Oberpfaffenhofen ist. Dann können durch eine sorgfältige Untersuchung des Ausmaßes der mechanischen Abnutzung weitere wichtige Informationen gewonnen werden, die dann für zukünftige Weltraumroboter verwendet werden können.
Ergebnisse des Experiments
Innerhalb von ca. 6 Jahren Betrieb (seit März 2005) haben wir über 500 Experimente erfolgreich durchgeführt.
Aufgrund von ISS-Computerproblemen, die im Sommer 2007 auftraten, war ROKVISS gezwungen, eine fünfmonatige Betriebspause einzulegen. Im Oktober 2007 wurde das Robotersystem ohne messbare Beeinträchtigung reaktiviert. Die Gelenke funktionierten wie befohlen. Das System befindet sich in einem sehr guten Zustand und arbeitet sehr zuverlässig!
Betrieb über Internet in Zusammenarbeit mit dem Institut für Robotik und technische Kybernetik in Sankt Petersburg:
Anfang 2009 wurde eine Kooperation zwischen dem DLR-RM und dem Institut für Robotik und technische Kybernetik (RTC in St.-Petersburg, Russland) gestartet. Das kurzfristige Ziel dieser Zusammenarbeit ist es, die ROKVISS-Flughardware über das Internet zu betreiben (siehe Website des RKK). DLR-RM hat ein Programm entwickelt, das es ermöglicht, das ROKVISS-System mit einer Spacemouse von jedem Ort der Welt aus zu steuern, der einen Netzwerkzugang bietet. Ende April 2009 wurde das erste Internet-Experiment mit der Flug-Hardware vom Heimbüro des Projektleiters aus über ein gewöhnliches DSL-Netzwerk (3MBit/s) durchgeführt. Die Befehls- und Telemetriedaten zwischen der Fernstation und der ROKVISS-Bodenkontrollstation beim DLR wurden mit einer gemessenen Round-Trip-Zeit von <80 ms und einer Gesamtbandbreite von ~16 kBit/s übertragen. Neben diesen Roboterdaten wurde auch der Echtzeit-Videodatenstrom des ROKVISS-Flugsystems in guter Qualität von der Fernkontrollstation empfangen.
Im September 2009 führten die Kollegen vom RTC ihr erstes Teleoperationsexperiment über das Internet durch, wobei sie das oben beschriebene Programm des DLR verwendeten.
In der Zwischenzeit wird am DLR-RM eine Telepräsenz-Fernsteuerungsstation entwickelt. Erste Tests mit einem Datenspiegel bei RTC haben gezeigt, dass die Telepräsenzsteuerung – mit einem Joystick als Kraftrückkopplung – mit sehr guter Leistung bei Umlaufzeiten von ca. 80 ms machbar ist.
Telepräsenz-Ergebnisse
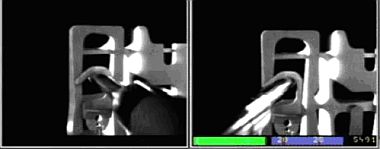
Bereits während der ersten Missionskontakte wurden Telepräsenz-Experimente durchgeführt. Es hat sich herausgestellt, dass die Gesamtzeit für die Telepräsenz-Experimente unter 20 ms liegt. Die Experimente im Telepräsenzmodus sind sehr zuverlässig und vermitteln dem Bediener am Boden einen sehr realitätsnahen Eindruck von der Kraftrückmeldung. Dieser Betriebsmodus ist ein sehr gutes Mittel für On Orbit Servicing (OOS) Missionen, bei denen der Bediener auf der Grundlage der Feedback-Informationen (Video und Kraft/Drehmoment) sofort reagieren muss. Die Stereo-Videoübertragung liefert ein realistisches 3D-Bild der Szene, wenn auch nur als Graubild. Das Präsenzgefühl wurde durch die realistische Kraftrückmeldung des DLR-Joysticks verbessert.

Die Positions- und Kraftwerte, die während eines Experiments zur Konturverfolgung aufgezeichnet wurden, sind unten dargestellt. Der Bediener konnte eine gute Positionsverfolgung des Slave-Systems und eine skalierte, aber identische Krafttrajektorie feststellen. Weitere Experimente mit den verschiedenen Kontrollarchitekturen werden folgen.
Ergebnisse zu den JOINTS:
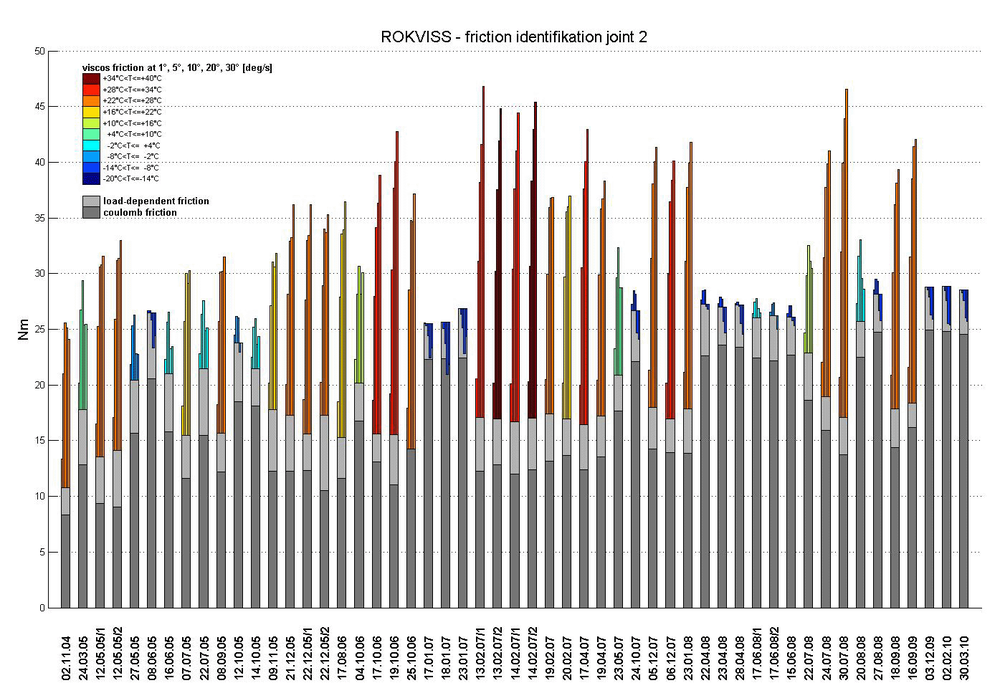
Zeit- und Temperaturabhängigkeit
{kind=link}
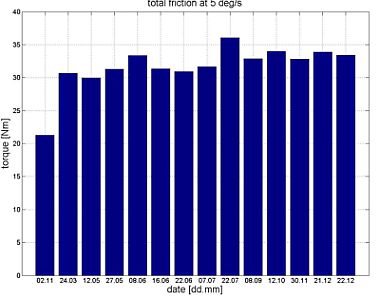
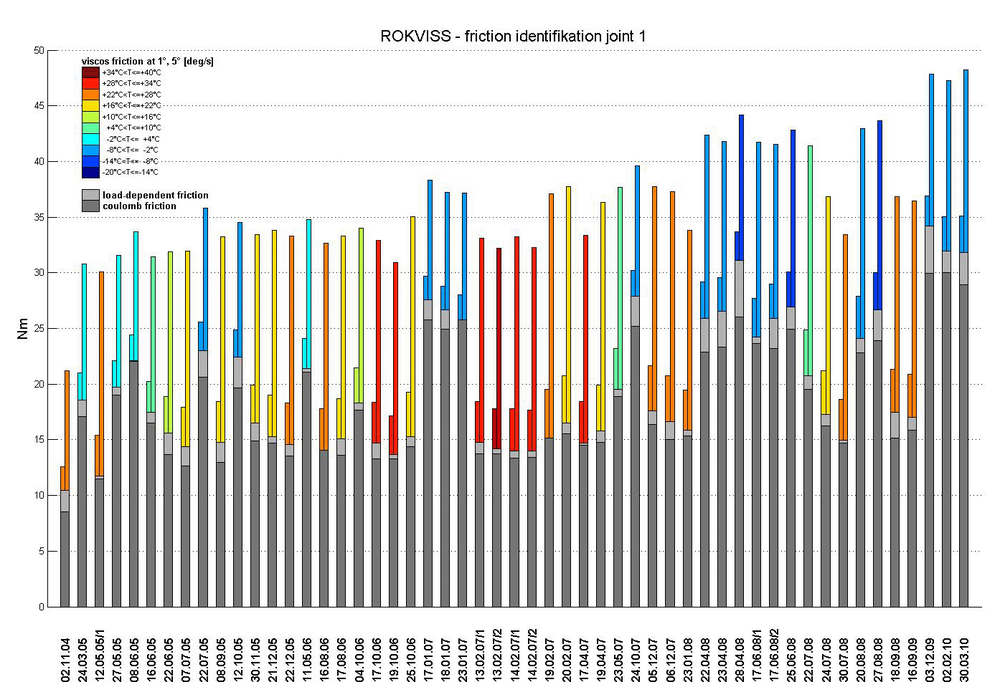
Die Ergebnisse der On-Orbit-Identifikation zeigen, dass sich die Gesamtreibung für Gelenk 1 im Weltraum um einen Faktor von etwa 50 % erhöht hat, verglichen mit der Reibung am Boden, gemessen bei 20°C und normalem atmosphärischen Druck. Allerdings ist im ersten Betriebsjahr bisher nur eine geringe weitere kontinuierliche Veränderung der Parameter zu beobachten (siehe Abbildung unten). Dies legt den Schluss nahe, dass das Schmiermittel seine Eigenschaften veränderte, als es zu Beginn der Mission den Bedingungen im Weltraum ausgesetzt war, und danach einen Betriebszustand mit langsamen Parameteränderungen erreichte.
Die Ergebnisse der Identifizierung der Reibung an den beiden Gelenken sind unten dargestellt:
Steifigkeit Identifizierung
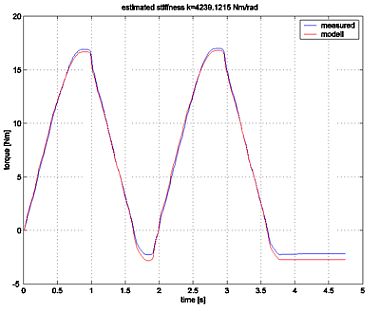
Die Hauptquellen der Elastizität in den Gelenken sind die Flexsplines der harmonischen Antriebe und die Drehmomentsensoren. Die Elastizität wird ermittelt, indem man mit der Spitze des Roboters eine starre Oberfläche berührt und den Gelenken eine sich langsam ändernde Kraft befiehlt. Da das Drehmoment nach dem Getriebe gemessen wird, kann die Steifigkeit mit dem verfügbaren Drehmoment- und Positionssignal leicht optimiert werden. Ein typisches Identifikationsergebnis sehen Sie in der Abbildung unten. Die Steifigkeit für beide Gelenke hat Werte um 5000 Nm/rad. Wie erwartet, ergaben die ersten Messungen keine signifikanten Unterschiede zwischen den Steifigkeitswerten am Boden und im Raum.
Detailliertere Versuchsergebnisse werden in Publikationen vorgestellt.
Downloads
- ASTRA 2006, Verifizierung von fortschrittlichen Leichtbau-Robotergelenken und Telepräsenzkonzepten für zukünftige Raumfahrtmissionen (1.5 MB)
- ASTRA 2006, Robotergelenke und kontaktdynamische Experimente (627.5 KB)
- ICRA 2006, ROKVISS Aktuelle experimentelle Ergebnisse zur Parameteridentifikation (789.4 KB)
- IROS 2006, Robotic On Orbit Servicing Experience (1.1 MB)
- IROS 2006, ROKVISS Vorläufige Ergebnisse für Telepräsenz (926.6 KB)
- iSAIRAS 2005, ROKVISS Space Robotics (1.5 MB)
- ROKVISS Dokumentation Realplayer (12MB) (12.0 MB)
- ROKVISS Dokumentation Realplayer (7MB) (7.0 MB)
- Telepräsenz Demo Realplayer (0.2MB) (219.6 KB)