
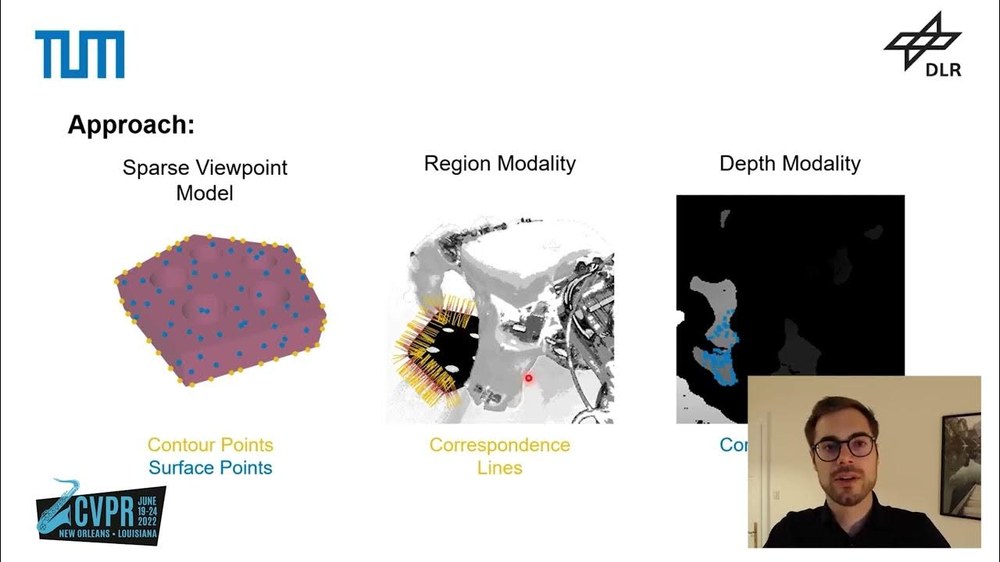
Iterative korrespondierende Geometrie: Verschmelzung von Region und Tiefe für hocheffizientes 3D-Tracking von texturlosen Objekten
Weitere Einzelheiten finden Sie in dem Dokument und in unserem Quellcode: https://openaccess.thecvf.com/content/CVPR2022/papers/Stoiber_Iterative_Corresponding_Geometry_Fusing_Region_and_Depth_for_Highly_Efficient_CVPR_2022_paper.pdf https://github.com/DLR-RM/3DObjectTracking/tree/master/ICG
Iterative korrespondierende Geometrie - Präsentation CVPR 2022
Iterative korrespondierende Geometrie - Präsentation CVPR 2022
Weitere Einzelheiten finden Sie in dem Dokument und in unserem Quellcode: https://openaccess.thecvf.com/content/CVPR2022/papers/Stoiber_Iterative_Corresponding_Geometry_Fusing_Region_and_Depth_for_Highly_Efficient_CVPR_2022_paper.pdf https://github.com/DLR-RM/3DObjectTracking/tree/master/ICG
Credit:
Weitere Einzelheiten finden Sie in der Veröffentlichung und in unserem Quellcode: https://github.com/DLR-RM/3DObjectTracking
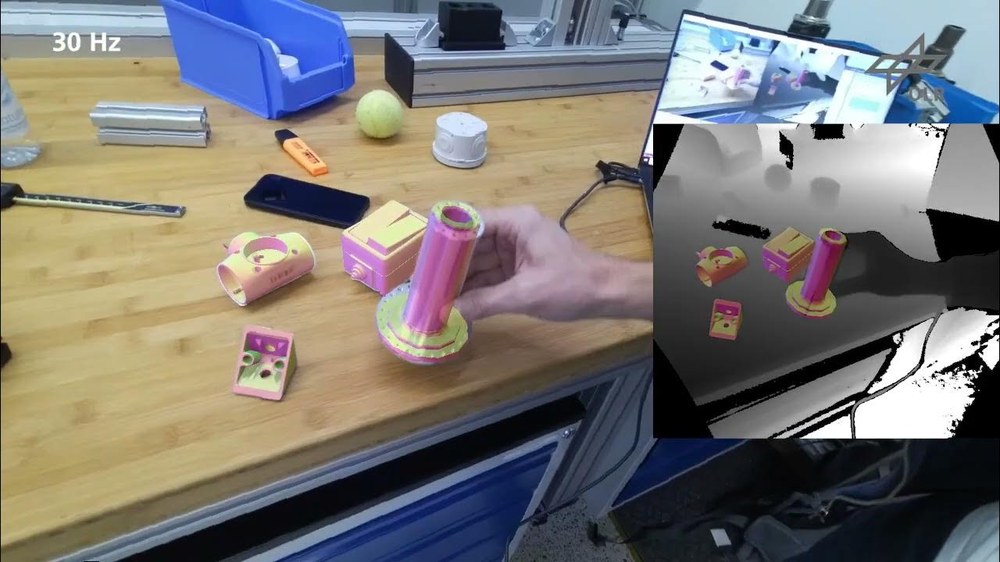
Iterative Corresponding Geometry (ICG) - Hocheffiziente 3D-Objektverfolgung - CVPR 2022
Iterative Corresponding Geometry (ICG) - Hocheffiziente 3D-Objektverfolgung - CVPR 2022
Weitere Einzelheiten finden Sie in der Veröffentlichung und in unserem Quellcode: https://github.com/DLR-RM/3DObjectTracking
Credit: