
Working/Master Student (f/m/x): Comparison of Classical and Learned Stereo Vision Methods
Background:
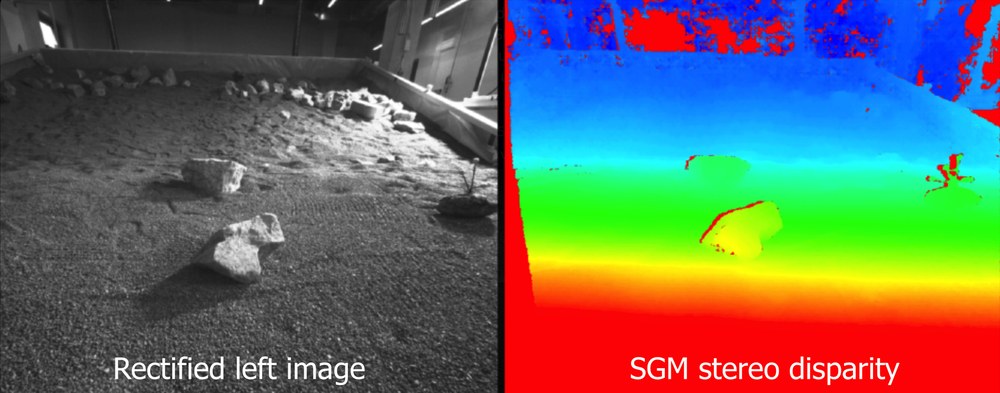
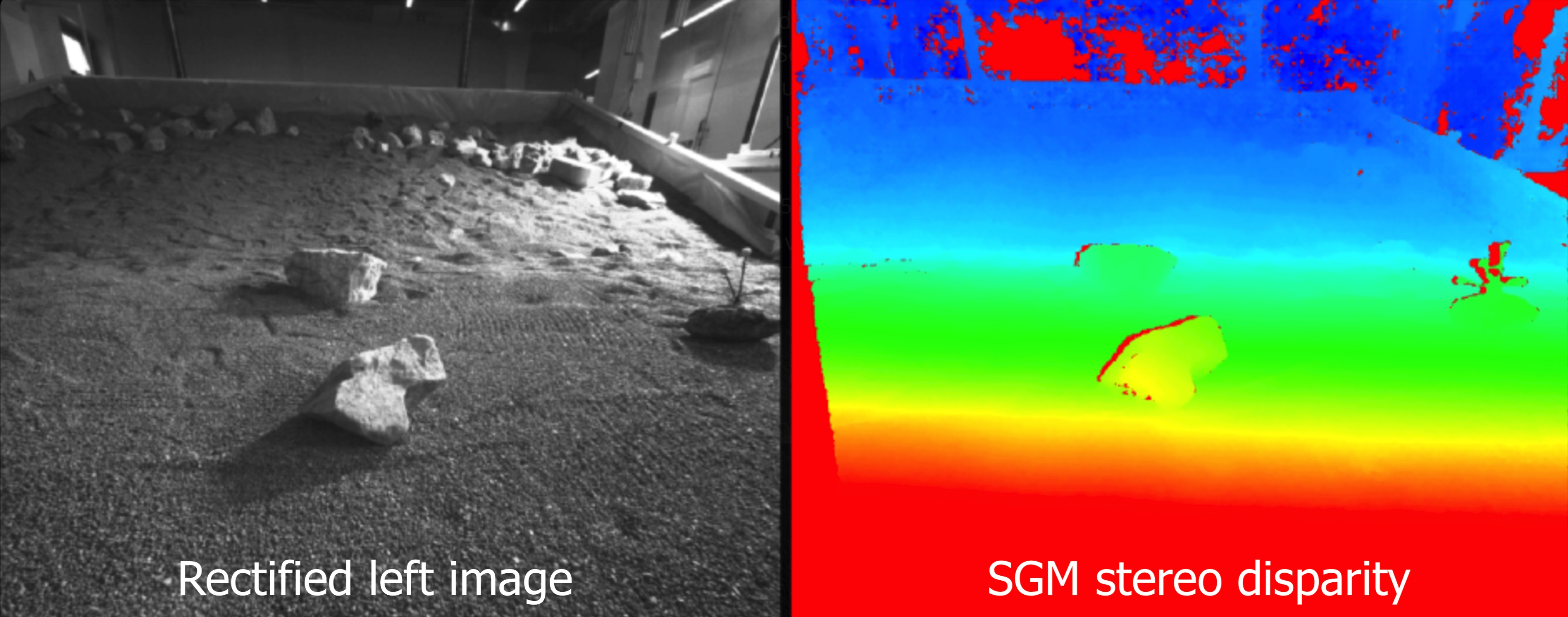
The best-known classical stereo vision algorithm, SGM, was developed at our institute 20 years ago and is still widely used in our robotic systems. SGM excelled in output density and accuracy due to its ability to regularise from prior knowledge such as spatial and rotation equivariance, illumination invariance, surface smoothness, and depth discontinuities at occlusions and object boundaries. However, each of these priors was implemented in a simplistic, human-engineered manner. Today, we know that neural networks trained on decent data can better account for these priors using inductive biases.
In this project, you will evaluate and compare both types of methods, with the objective of coupling both approaches (either tightly, loosely, or sequentially) to enhance output confidence. In addition, monocular depth inference will be considered, both for its own merits and as a complement to stereo vision. Lastly, their implementation on diverse platforms (e.g. CPUs, GPUs, edge devices, FPGAs) will be discussed.

{kind=link}
Your Tasks:
- State-of-the-art research on classical and learned stereo matching and depth inference.
- Testing and comparison of available classical and learned stereo vision methods on relevant evaluation metrics.
- Conduct research to advance stereo vision algorithms by combining classical and data-driven approaches for depth estimation into a hybrid method of high confidence and accuracy.
- Platform-specific implementation analysis, considering methodical and application constraints.
- Discussion on the required extra domain-specific datasets (e.g. planetary exploration, minimally invasive surgery) using photo-realistic, high-quality simulators like OAISYS and BlenderProc2.
- Avid interaction with the relevant robotic teams, ideally with experimental field tests.
- Detailed thesis-compliant report of your results, with optional publication submission.
Your Qualifications:
- Final year master student in engineering, computer science, physics, or a related field, with excellent academic results.
- Background on robotics, stereo depth estimation, camera calibratin, and machine/deep learning is advantageous.
- Programming skills in C++ and Python.
- Experience with Linux environments and Git.
- Familiarity with machine learning frameworks (PyTorch, TensorFlow, CUDA) and robotic middleware (ROS) is highly desirable.
- Experience with 3D computer graphics (e.g., Blender) is a plus.
- Fluent English communication and reporting skills.
- A high level of motivation for hands-on research.
Contract duration is up to 8 months (up to 2 months as working student, followed by 6 months for the thesis research).
For application, first make contact (see below) to briefly indicate your interest and qualifications. We will then get back to you.