
SpaceJustin (2010–2016)

{kind=link}
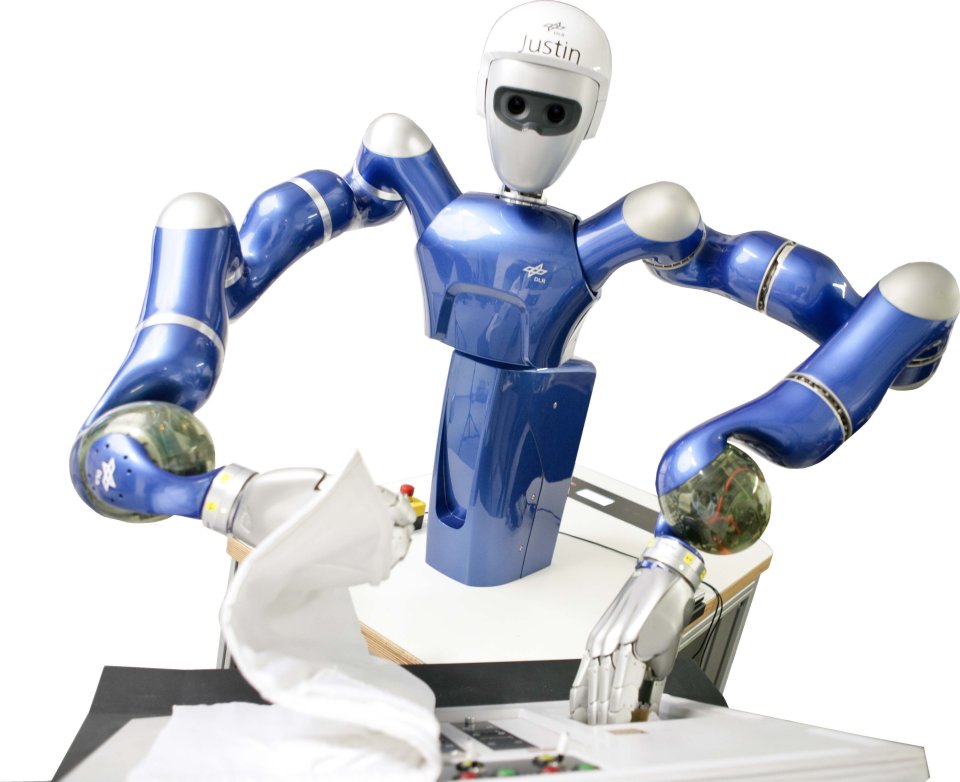
SpaceJustin ist die zentrale Forschungsplattform für vom Menschen gesteuerte robotische Manipulation am DLR. Zusammen mit HUG, der am DLR entwickelten Mensch-Maschine-Schnittstelle, bildet SpaceJustin eine Experimentalumgebung zur Verfikation entwickelter Methoden für Telepräsenz und Shared Autonomy in verschiedenen Anwendungsszenarien (On-Orbit Servicing, industrielle Wartung).
Die Manipulationsfähigkeit des Menschen wird durch zwei drehmomentgeregelte Arme (LBR), zwei fünffinger Hände (DLR-HIT Hands II), einen beweglichen Kopf mit Stereokamera und einem Torso angenähert. Zusätzliche Sensorik ist für autonome Funktionalitäten integriert.
Technische Daten
Gewicht | 45 kg |
Freiheitsgrade | 47 (Arme: 2 × 7, Hände: 2 × 15, Torso: 1, Kopf: 2) |
Nominale Tragkraft | 15 kg |
Energieversorgung | Netzstrom (220V, 50Hz) |
Besondere Merkmale |
|
Systembeschreibung
SpaceJustin besteht ausschließlich aus einem Oberkörper-Modul und bildete zusammen mit HUG, der am DLR entwickelten Mensch-Maschine-Schnittstelle, eine Experimentalumgebung zur Verifikation entwickelter Methoden für Telepräsenz und Shared Autonomy. Das System weist einem dem Menschen ähnlichen Aufbau auf, indem es folgende Komponenten bereitstellt:
- Zwei drehmomentgeregelte Arme (DLR-LBR)
- Zwei fünffinger-Hände (DLR-HIT Hands II)
- Beweglicher Kopf mit einem Stereo-Kamera-System
- Drehbarer Torso (1 DOF)
Die integrierte Kraft-Sensorik unterstützt autonome Funktionen und ermöglicht haptische Rückmeldung bei der Teleoperation.
Hintergrund und verwandte Roboter
SpaceJustin ist Teil einer Familie von humanoiden Robotern, die am DLR entwickelt wurden. Dazu gehören auch Table Justin (2006), der erste humanoide Roboter des DLR, sowie Rollin' Justin und Agile Justin. Diese Roboter teilen ähnliche Designprinzipien und konzentrieren sich auf verschiedene Aspekte der humanoiden Robotik, wie z.B. mobile Manipulation, Servicerobotik und Telepräsenz.
Einsatz im Kontur-2-Projekt
Das Kontur-2-Projekt ist ein Zwischenschritt zu weiterführenden Raumfahrtmissionen, bei denen telepräsent gesteuerte Roboter und Rover Planetenoberflächen erforschen. Im Rahmen des Projekts wurde SpaceJustin eingesetzt, um die Fähigkeiten von humanoiden Robotern in der Telepräsenz und Shared-Autonomy zu testen und zu verbessern. Im Dezember 2015 wurde ein "Tele-Handshake" zwischen der Besatzung der Internationalen Raumstation ISS und Wissenschaftlern am Deutschen Zentrum für Luft- und Raumfahrt (DLR) auf der Erde durchgeführt. Dabei konnten die Astronauten auf der ISS und die Wissenschaftler auf der Erde sich gegenseitig sehen, miteinander sprechen und dank Kraftrückkoppelung die Kraft und die Bewegung des Händeschüttelns spüren.
Forschungsschwerpunkte
Die Forschung mit SpaceJustin konzentrierte sich auf folgende Schwerpunkte:
- Psycho-physische Untersuchungen: Analyse der Arbeitsbelastung von Operateuren bei robotischer Fernmanipulation.
- Autonome Funktionen: Entwicklung von Assistenzmodulen, die die Bedienung vereinfachen und die Arbeitsbelastung des Operators reduzieren.
- Multilaterale Telemanipulations-Regelungsmethoden: Stabile Telemanipulation über große Distanzen, die auch hohe Latenzen einbezieht.
Video

Für die Wiedergabe dieses Videos auf Youtube.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.