
DLR CalDe und DLR CalLab – Die DLR Kamera-Kalibrierungs-Toolbox
DLR CalLab entstand Ende 2005 am Institut für Robotik und Mechatronik. Die Software entstand aus dem strategischen Ziel, das frühere CalLab-Paket zu aktualisieren und gleichzeitig eine plattformunabhängige Anwendung zu entwickeln. Es wurde beschlossen, eine völlig neue Anwendung zu entwickeln – unabhängig, aber inspiriert vom alten CalLab. Mit Blick auf die Plattformunabhängigkeit entschied man sich für die Entwicklung in der Sprache IDL. Darüber hinaus führte diese Wahl zu einer kürzeren Entwicklungszeit und einer höheren Leistung.
Im Hinblick auf das Anwendungsdesign wurde die Merkmalserkennung von der Anwendung zur Parameterschätzung getrennt. Die erstgenannte Aufgabe wird nun von dem Programm DLR CalDe übernommen, das völlig unabhängig von DLR CalLab ist, während die letztgenannte Aufgabe ausschließlich von DLR CalLab übernommen wird. Die einzige Schnittstelle sind einfache Textdateien.
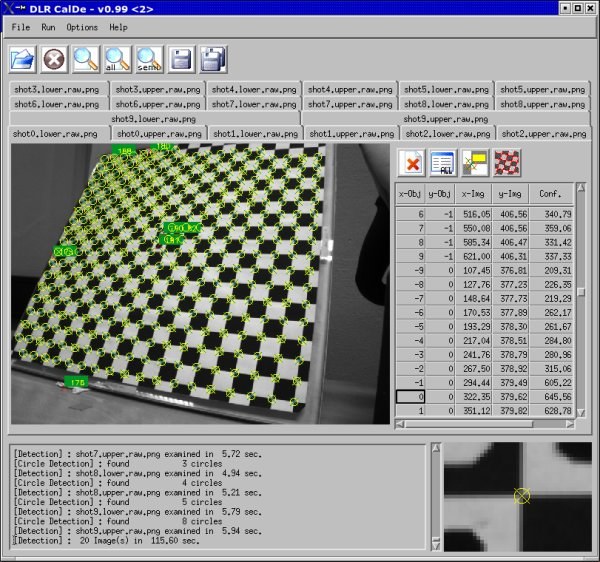
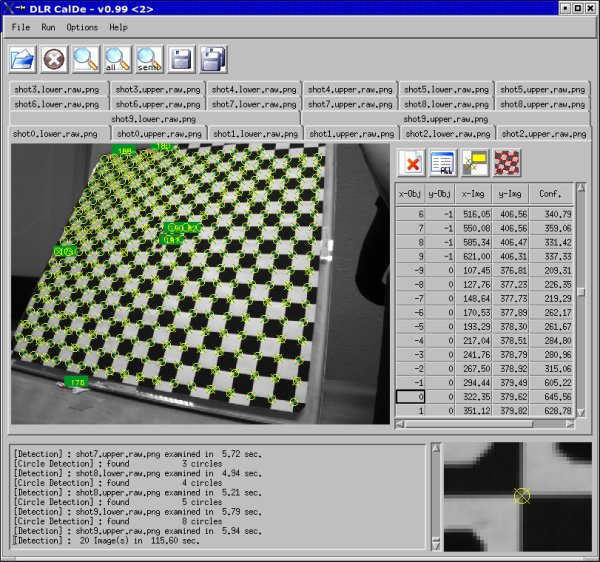
DLR CalDe (DLR Calibration Detection Toolbox)
Die Erkennungs-Toolbox DLR CalDe dient der Lokalisierung von Landmarken/Ecken auf einem schachbrettartigen 2D-Kalibrierungsfeld mit Sub-Pixel-Genauigkeit.
Im Gegensatz zu den meisten ähnlichen frei erhältlichen Toolboxen erfolgt der Vorgang hier vollautomatisch. Darüber hinaus muss das Kalibrierungsmuster nicht mehr vollständig in den Bildern sichtbar sein. Diese Tatsache hat zweierlei Auswirkungen: Erstens ist es damit möglich, die Objektivverzeichnung auch in den Randbereichen des Bildes zu kalibrieren. Zweitens wird die Kalibrierung von Stereokameras und Auge-in-Hand- oder Auge-zu-Hand-Systemen erleichtert, da teilweise sichtbare Muster zur Kalibrierung ausreichen.
Die Anwendung behält jedoch auch die Möglichkeit der manuellen Interaktion und Anpassung der ausgewählten Orientierungspunkte bei.
Schließlich werden Dateien mit den Korrespondenzen zwischen den Landmarken des Kalibrierungsobjekts und ihren (Stereo-)Bildkoordinaten erstellt. Diese sind Ausgangspunkt für die Kamerakalibrierungs-Toolbox DLR CalLab.

{kind=link}
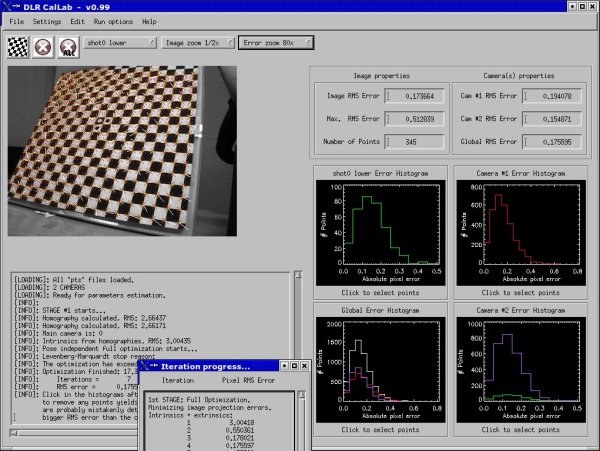
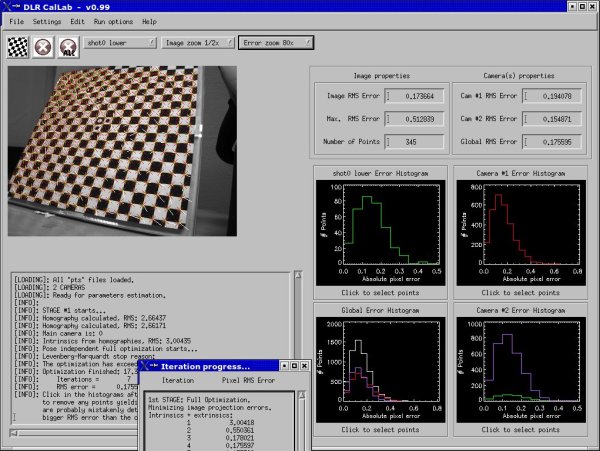
DLR CalLab (DLR Calibration Laboratory)
DLR CalLab schätzt sowohl die intrinsischen als auch die extrinsischen Parameter einer einzelnen Kamera oder einer Stereokamera (d.h. einer Konstellation von zwei oder mehr Kameras, die fest miteinander verbunden sind) auf der Grundlage der zuvor erkannten Bildmerkmale (z.B. aus DLR CalDe).
Intrinsische Parameter beschreiben die perspektivische Projektion, Verzerrungen durch Objektiv und Sensor (z.B. Chip) sowie den Digitalisierungsprozess. Diese definieren die nichtlineare Transformation zwischen den Koordinaten im Kamerabild und denen im Bildspeicher. Im Falle der Stereokamerakalibrierung kann die Starrkörpertransformation zwischen den Kameras auch als intrinsischer Parameter der Stereokamera-Instanz betrachtet werden.
Extrinsische Parameter beschreiben die Starrkörpertransformationen zwischen dem Hauptkamerarahmen und entweder dem Weltrahmen oder dem Tool Center Point (TCP) Rahmen. Die erstere Transformation ändert sich zu verschiedenen Zeitpunkten (Kamerastationen), während die letztere konstant bleibt, solange die Kamera(s) starr mit dem TCP verbunden bleibt. Für die Kamera-TCP-Kalibrierung (im Allgemeinen als Hand-Auge-Kalibrierung bekannt) werden mehrere zuvor beschriebene Methoden (insbesondere die 2D-Bildreprojektion-Fehlerminimierung sowie verschiedene Lösungen in geschlossener Form) sowie die neue Methode, die in Ref. [1] vorgestellt wurde.
Darüber hinaus bietet das Programm umfangreiche Interaktionsmöglichkeiten:
- Auswahl und Parametrisierung verschiedener numerischer Optimierungsalgorithmen
- praktische Histogramme und Bilder für die Auswahl der zu entfernenden Merkmale. Diese Aufgabe hat das DLR CalLab in Bezug auf das DLR CalDe übernommen, da geschätzte, reprojizierte Punkte von zentraler Bedeutung sind, um die erkannten Punkte umgehend zu überprüfen
- eine Vielzahl von Schätzungsmethoden
- Flexibilität bei der Auswahl des Linsenverzeichnungsmodells - falls vorhanden - bis hin zu radialer Verzeichnung 3., 5. und 7. Ordnung, dezentrierender Verzeichnung 2. und 4. [2]
- Freigabe des Seitenverhältnisses und des absoluten Maßstabs des Kalibrierungsziels, siehe Ref. [3]
- Freigabe der vollständigen Geometrie des Kalibrierungsziels während der intrinsischen und extrinsischen Kalibrierung nach den neuen Methoden in Ref. [4]
Es ist jedoch auch möglich, die gesamte Kalibrierung automatisch im Ein-Knopf-Modus durchzuführen.
{kind=link}
Publikationen
[1] K. H. Strobl and G. Hirzinger. "Optimal Hand-Eye Calibration." In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2006), Beijing, China, pp. 4647-4653, October 2006.
[2] J. Weng, P. Cohen, and M. Herniou. "Camera calibration with distortion models and accuracy evaluation." In IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI), 14(10): 965-980, 1992.
[3] K. H. Strobl and G. Hirzinger. "More Accurate Camera and Hand-Eye Calibrations with Unknown Grid Pattern Dimensions." In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2008), Pasadena, California, USA, pp. 1398-1405, May 2008.
[4] K. H. Strobl and G. Hirzinger. "More Accurate Pinhole Camera Calibration with Imperfect Planar Target." In Proceedings of the IEEE International Conference on Computer Vision (ICCV 2011), 1st IEEE Workshop on Challenges and Opportunities in Robot Perception, Barcelona, Spain, pp. 1068-1075, November 2011.
Danksagung
Diese Arbeit wurde teilweise durch das Sechste Rahmenprogramm der Europäischen Kommission unter der Förderungsnummer 011838 als Teil des integrierten Projekts SMErobot finanziert.