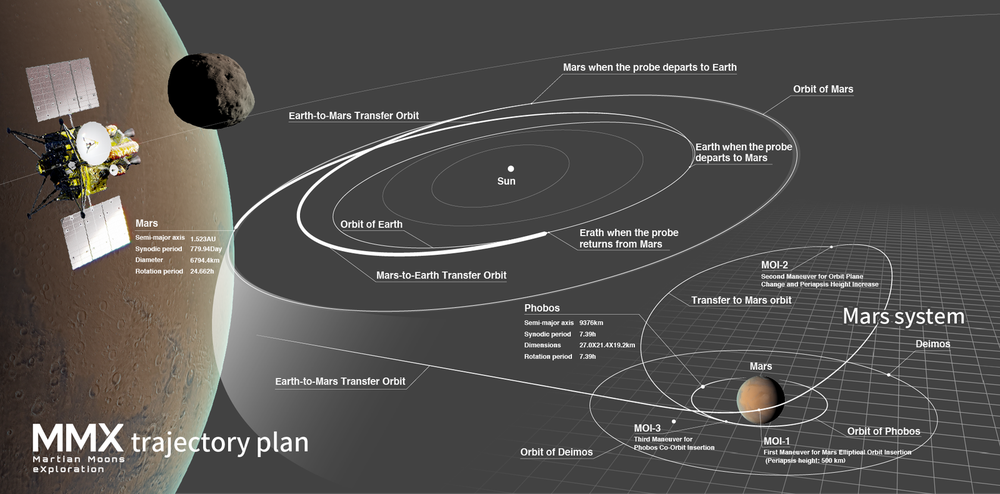
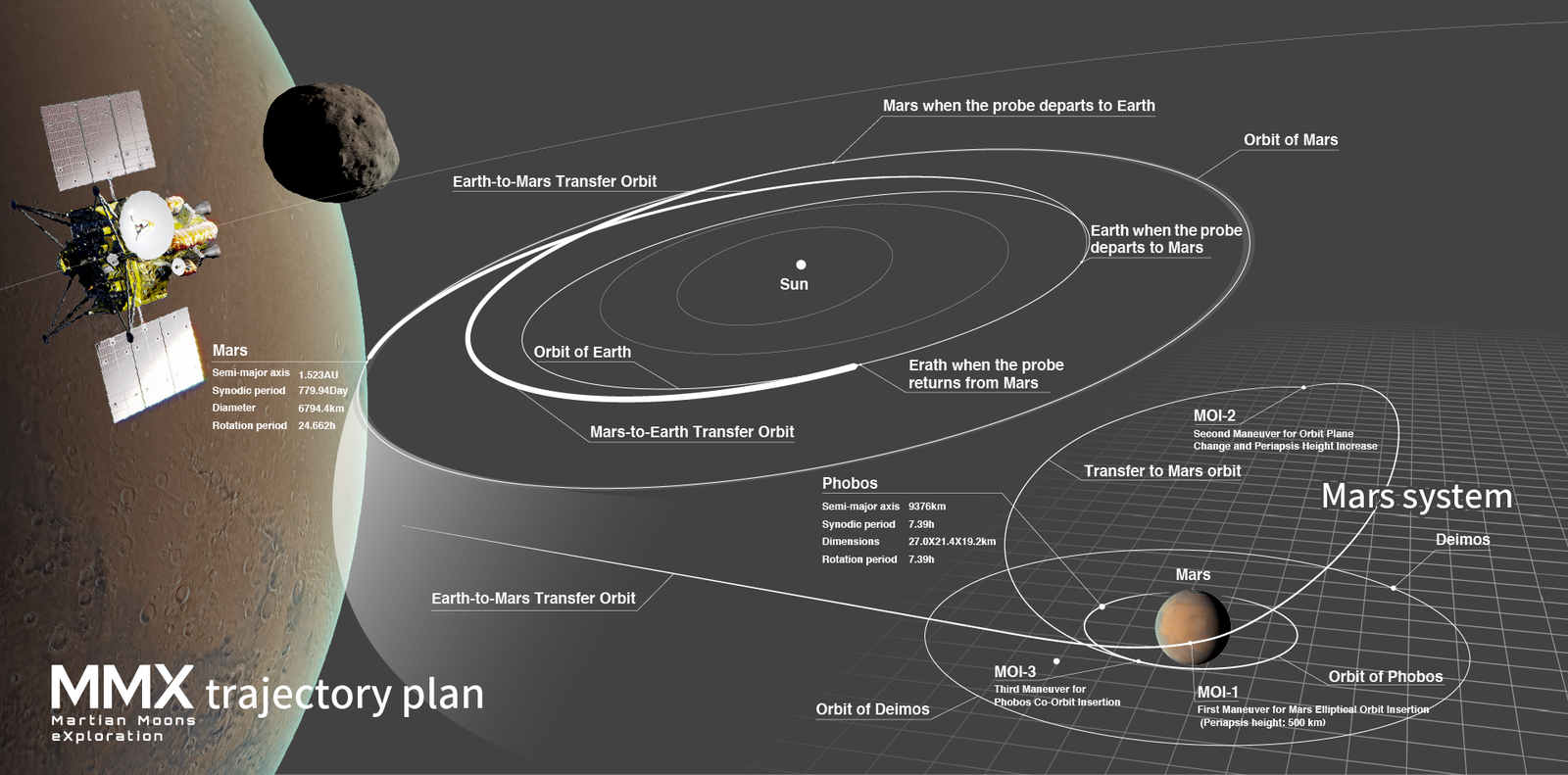
The lower part of the image shows the outbound flight of the MMX spacecraft. Major milestones are the manoeuvres to enter Mars orbit (MOI-1), the transfer from Mars to Phobos orbit (MOI-2) and finally the entry into Phobos orbit (MOI-3).
The Japanese Martian Moons eXploration (MMX) mission will explore how the two martian moons, Phobos and Deimos, formed and improve our understanding of the formation of the planets in our Solar System in general. The primary focus of the mission's scientific objectives is to better understand the processes behind the development of the Martian system. DLR is making a significant contribution to the mission in collaboration with the French space agency, CNES: the MMX rover Idefix.
Thre MMX spacecraft consists of:
a propulsion module with propellant tanks and rocket engines for launch into Mars and Phobos
an orbitan exploration module with landing legs
a sampler and scientific instruments
a rover jointly developed by DLR and CNES
a return module housing the sample return capsule
MMX mission data
MMX
Data
Launch
2026
Project duration
January 2020 to 31 December 2031
Launch site
Tanegashima, Japan
Launch vehicle
H-3
Mission duration
Six years
Arrival in Mars orbit
2027
Rover lands on Phobos
2029
Sampling by explorer module
2029
Return module begins return flight
2030
Return module lands on Earth
2031
MMX rover Idefix data
MMX-Rover
Data
Dimensions
231 by 376 by 415 millimetres
Mass
25 kilograms
Mass of scientific payload
2.5 kilograms
Dimensions of solar panels
4 by 415 by 363 millimetres
Energy production
At least 60 watt-hours per Phobos day (7h)
Representative speed
Approximately one millimetre per second
Duration of operation on the surface of Phobos
100 days
Rover control centres
DLR: Microgravity User Support Center, Cologne, Germany
Mechanical and Electrical Connection and Support System (MECSS), shutter, product assurance, assembly integration and test, provide pre-assembled chassis
Rover operations (together with CNES), scientific co-management,
payload management
DLR scientific instruments on the rover
Technical drawing of the MMX rover
Top: Rover in fully extended configuration with positions of the radiometer MiniRad and the locomotion systems for each rover wheel. Bottom: Interior view with position of the instruments - including the spectrometer RAX - and the on-board computer (OBC).
The primary objective of the miniRAD radiometer is to determine the surface temperature of Phobos. By measuring the heat radiation in six infrared wavelength ranges, researchers can draw conclusions about the material properties of rocks and loose material (regolith), such as grain size, porosity and mechanical strength, at different locations. The measured values can then be directly compared with samples collected from asteroids and meteorites. miniRAD can also be used to determine the optical properties of the surface. The instrument will be used to determine the radiance of samples in three spectral bands, which will allow for an initial mineralogical characterisation of the surface of Phobos.
Researchers will use the RAX spectrometer to determine which materials make up the surface of Phobos. They will investigate which rock types can be found and how frequently they are detected. This will allow them to draw conclusions about the geochemical, thermal and radiation processes that led to the formation of these minerals. The measurements conducted on the surface of Phobos will be compared with analyses of martian rocks made by other missions. In combination with the analysis of the samples transported to Earth by MMX, these measurements will help researchers test the various theories on the formation of Phobos and Deimos.
CNES' contributions to the rover
Camera system used for spatial orientation and surface exploration
Camera system used for the investigation of the soil's mechanical properties
Central service module of the rover including the onboard computer and the power and communication system as well as solar panels, assembly and test of the flight model of the entire rover
Rover operations on the Phobos surface (together with DLR)
2. Exploration module
Instrument name
Instrument type
Objective
C-SMP (JAXA)
Sampler (drill core)
Collect material from depths greater than two centimetres
P-SMP (JAXA)
Pneumatic sampler
Collect loose material at the surface
LIDAR (JAXA)
Laser-Altimeter
Map / image surface
MSA (JAXA)
Ion mass spectrometer
Detect possible ice deposits
OROCHI (JAXA)
Multispectral wide-angle camera
Image the surface and provide mineralogical information
TENGOO (JAXA)
Telescopic camera
Acquire high-resolution images of the surface
MEGANE (NASA)
Gamma / neutron spectrometer
Determine elemental composition
MiRS (CNES)
Near-infrared spectrometer
Study rock, water and organic material
3. Return module
Instrument name
Instrument type
Objective
CMDM (JAXA)
Dust counter
Conduct measurements on the dust in the environment
IREM (JAXA)
Radiation sensor
Conduct measurements on the radiation in the environment
SHV (JAXA)
Outreach camera
Acquire image and video
SRC (JAXA)
Sample Return Capsule
Transport samples to Earth
MMX – Martian Moons eXploration
MMX is a mission of the Japanese space agency JAXA with contributions from NASA, ESA, CNES (the French space agency) and DLR. CNES (Centre National d'Études Spatiales) and the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) are jointly contributing a 25-kilogram rover to the Martian Moons eXploration Mission (MMX). The Franco-German MMX rover is being designed and built under the joint leadership of CNES and DLR. In particular, DLR is responsible for the development of the rover's landing gear, including the lightweight body, as well as the entire uprighting and locomotion system. DLR is also contributing the connection adapter to the MMX spacecraft and providing a Raman spectrometer and a radiometer as scientific experiments. These will analyse the surface composition and texture on Phobos. CNES is making significant contributions with camera systems for spatial orientation and exploration on the surface, as well as for the study of mechanical soil properties. CNES is also developing the rover's central service module, including the on-board computer and the power and communications system.
After the launch of the MMX mission, the rover will be operated by CNES control centres in Toulouse (France) and DLR in Cologne (Germany).
The MMX mission is a continuation of an already long-standing successful cooperation between JAXA, CNES and DLR. It builds on the previous mission Hayabusa2, in which JAXA sent a spacecraft to the asteroid Ryugu with the German-French MASCOT lander on board. On 3 October 2018, MASCOT landed on Ryugu and sent spectacular images of a landscape ridden with boulders and rocks, and virtually no dust. Hayabusa2 collected samples from Ryugu and brought them to Earth on 6 December 2020.


{kind=link}