Durchmarsch Richtung Mars: ISS-Robotik-Experiment Surface Avatar erfolgreich abgeschlossen
29. Juli 2025
Durchmarsch Richtung Mars: ISS-Robotik-Experiment Surface Avatar erfolgreich abgeschlossen
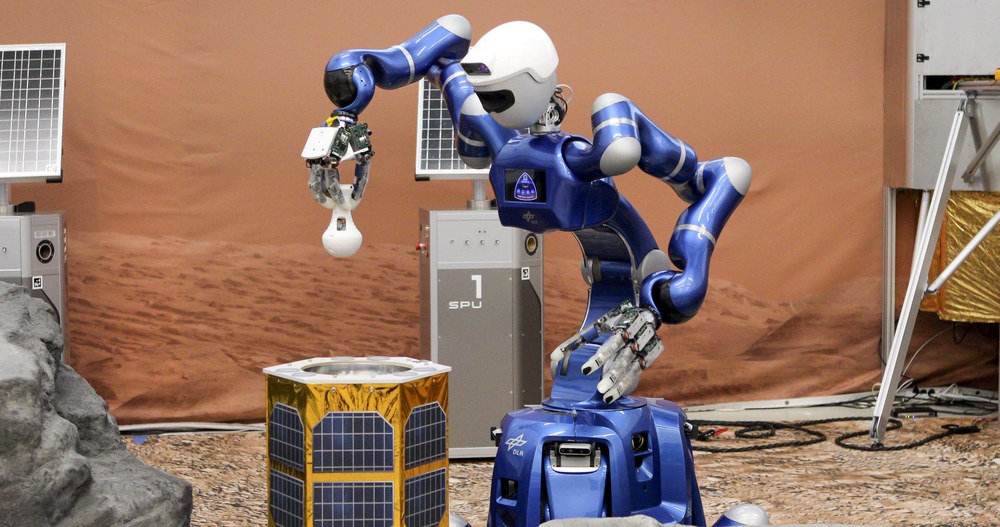
DLR-Roboter Rollin’ Justin holt Probenbehälter ab
Das Surface-Avatar-Team demonstrierte den Steuerungswechsel zwischen mehreren Robotern: Nachdem ESA-Roboter Spot die Übergabestation mit den Gesteinsproben gefüllt hatte, kommandierte der NASA-Astronaut den DLR-Roboter Rollin‘ Justin, die Behälter von der Übergabestation zum Lander zu bringen.
Der vierbeinige DLR-Roboter Bert ist kompakt gebaut und beherrscht verschiedene Gangarten. Dadurch eignet er sich für Explorationsaufgaben in schwierigem Gelände. Für die Technologiedemonstration Surface Avatar steuerte NASA-Astronaut Jonny Kim (an Bord der ISS) den Roboter, um eine Höhle in der Marslandschaft des DLR in Oberpfaffenhofen zu erkunden.
Weltweit erster Roboter-Roboter-Transport: ESA-Rover Interact bringt den vierbeinigen DLR-Roboter Bert zu dessen Einsatzort. Der Rover ist mit einem Greifarm ausgestattet, sodass er den kleinen Kollegen bei sich auf- und abladen kann.
NASA-Astronaut Jonny Kim steuerte von der ISS aus ein Roboterteam auf dem „irdischen Mars“ des DLR und absolvierte erfolgreich das bislang anspruchsvollste Experiment der Surface-Avatar-Reihe.
Die Roboter demonstrierten unter realitätsnahen Bedingungen ihre Fähigkeit zur Zusammenarbeit mit dem Astronauten und zur Problemlösung – einschließlich eines Ausfallszenarios mit dem vierbeinigen DLR-Roboter Bert.
Der vom DLR auf das Experiment trainierte KI-Chatbot-Assistent „Neal AI“ unterstützte den Astronauten direkt aus dem Orbit – ein zukunftsweisendes Instrument für künftige Weltraummissionen.
Mit vier Robotern und einer Live-Schalte zur Internationalen Raumstation ISS herrschte ungewöhnlicher Betrieb auf dem „irdischen Mars“ des Deutschen Zentrums für Luft- und Raumfahrt (DLR) in Oberpfaffenhofen. Am 24. Juli 2025 führte das Surface-Avatar-Team das letzte und bisher anspruchsvollste Experiment der Mission Surface Avatar vor. NASA-Astronaut Jonny Kim hatte an Bord der ISS das Kommando über das intelligente Roboterteam am Boden, das ihm half, die „Marslandschaft“ sicher zu erkunden und Proben zu sammeln. Dabei ließ er die verschiedenen Roboter nach Bedarf gemeinsam und teil- oder vollautonom agieren. Ein neues Feature, das zusätzlich getestet wurde, ist der Chatbot „Neal AI“, der den Astronauten bei Fragen unterstützte.
„Das Surface-Avatar-Experiment ist ein Meilenstein in der Kollaboration von Menschen und Robotern im Weltall. Wir haben dadurch alle technischen Voraussetzungen erreicht, um komplexe robotische Missionen auf dem Mars zu steuern, auch in Richtung einer zukünftigen permanenten lunaren Forschungsstation“, erklärt Prof. Alin Albu-Schäffer, Direktor des DLR-Instituts für Robotik und Mechatronik.
Kern der Technologie-Demonstration ist es, eine Person ohne intensives Training zu befähigen, ein Team aus unterschiedlichen Robotern zu kommandieren und gezielt einzusetzen. Die 2022 gestartete Experimentreihe Surface Avatar wird vom Institut für Robotik und Mechatronik geleitet und erfolgt in Zusammenarbeit mit der Europäischen Weltraumorganisation ESA und dem Deutschen Raumfahrtkontrollzentrum GSOC.
„Durch die Experimente mit dem Astronauten in Mikrogravitation und der Verbindung über Relais-Satelliten haben wir die technischen Hürden bei der Fernsteuerung von Robotern gemeistert. Wir sind daher sicher, dass wir auch in zukünftigen Szenarien bewerkstelligen können, sei es Lunar Gateway, Mondhabitate oder Erde zu Roboter. Wir haben mit diesen Experimenten und Technologien einzigartige Expertise in Europa aufgebaut, die auch für Anwendungen auf der Erde nützlich ist“, sagt Thomas Krüger, Team Lead ESA Human-Robot Interaction Lab.
Mehr Roboter, schwierigere Aufgaben
Als Steigerung zum letzten Surface-Avatar-Experiment im Juli 2024 sind nicht nur die Aufgaben schwieriger und die Roboter selbstständiger geworden – es ist auch ein weiterer Roboter hinzugekommen. Neben dem humanoiden DLR-Roboter Rollin‘ Justin, ESA-Rover Interact und dem vierbeinigen DLR-Roboter Bert vervollständige nun der vierbeinige ESA-Roboter Spot das Explorationsteam.
Spot ist größer als Bert und mit einem Greifarm ausgestattet. So gab Jonny Kim ihm die Aufgabe, ausliegende Probenbehälter selbstständig zu finden und zur Übergabestation zu bringen. Der NASA-Astronaut wechselte dann direkt zu Roboter Rollin‘ Justin mit der Aufgabe, die eingetroffenen Behälter von der Übergabestation zum Lander zu bringen. So sammelten die beiden Roboter selbstständig mehrere „Marsproben“ für den Rücktransport zur Erde, während der Astronaut sich den nächsten Aufgaben widmen konnte.
Surface Avatar ist eine Raumfahrt-Demonstrationsmission von DLR und ESA, die zwischen der Internationalen Raumstation ISS und einer simulierten Marsumgebung am DLR-Standort Oberpfaffenhofen in Deutschland durchgeführt wird. In diesem neuesten und letzten Experiment der Surface-Avatar-Reihe steuert der NASA-Astronaut Jonny Kim ein Team von verschiedenen Robotern, darunter ein humanoider Roboter, ein Rover und zwei vierbeinige Roboter, die zusammenarbeiten, um die simulierte Marsumgebung zu erkunden und zu bearbeiten. Kim kann sein Roboterteam auf der Oberfläche als intelligente Mitarbeiter mit autonomen Befehlen beauftragen oder die Bewegungen der Roboter übernehmen, um vollständig in die Umgebung des Roboters einzutauchen und alles um ihn herum zu berühren und zu fühlen. Dies wird das erste Mal sein, dass KI eingesetzt wird, um einem Astronauten im Weltraum zu helfen, einen Roboter zu trainieren und mit ihm zu arbeiten.
Für die Wiedergabe dieses Videos auf Youtube.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
Surface Avatar ist eine Raumfahrt-Demonstrationsmission von DLR und ESA, die zwischen der Internationalen Raumstation ISS und einer simulierten Marsumgebung am DLR-Standort Oberpfaffenhofen in Deutschland durchgeführt wird. In diesem neuesten und letzten Experiment der Surface-Avatar-Reihe steuert der NASA-Astronaut Jonny Kim ein Team von verschiedenen Robotern, darunter ein humanoider Roboter, ein Rover und zwei vierbeinige Roboter, die zusammenarbeiten, um die simulierte Marsumgebung zu erkunden und zu bearbeiten. Kim kann sein Roboterteam auf der Oberfläche als intelligente Mitarbeiter mit autonomen Befehlen beauftragen oder die Bewegungen der Roboter übernehmen, um vollständig in die Umgebung des Roboters einzutauchen und alles um ihn herum zu berühren und zu fühlen. Dies wird das erste Mal sein, dass KI eingesetzt wird, um einem Astronauten im Weltraum zu helfen, einen Roboter zu trainieren und mit ihm zu arbeiten.
Besondere Team- und Lernfähigkeit der Roboter demonstrierte das Surface-Avatar-Team bei der nächsten Herausforderung: Um eine Höhle zu erkunden, kommandierte Jonny Kim den Interact-Rover, der wiederum den Roboter Bert in seinem Transportkorb geladen hatte – der weltweit erste Roboter-Roboter-Transport. Telekommandiert durch den Astronauten im All fuhr der Rover zu der Höhle, hob mit seinem Greifarm den kleinen Vierbeiner vorsichtig heraus und setzte ihn auf dem Boden ab.
Doch Bert hatte sich „verletzt“ – eines seiner Beine klemmte, sodass der Vierbeiner nicht wie vorgesehen die Höhle erkunden konnte. Das Experimentteam auf der Erde hatte diese Fehlfunktion beabsichtigt, damit Astronaut und Roboter – wie bei einer echten Weltraummission – spontan ein unvorhergesehenes Problem lösen müssen. Dazu ist Bert mit „bestärkendem Lernen“, einer Methode des maschinellen Lernens, ausgestattet. Um mit drei Beinen einen stabilen Gang für Bert zu finden, führte Jonny Kim dazu ein „Training“ durch: Er ließ den Roboter verschiedene Gangarten ausprobieren und bewertete diese, bis Bert eine funktionierende Strategie gefunden hatte. Nach der erfolgreichen Lerneinheit absolvierte der DLR-Roboter seine Höhlenerkundung. Hier entschied sich der Astronaut für die manuelle Steuerung – über Berts Kamera-Augen konnte er sehen, was der Roboter sieht, und ihn über den Joystick des Robot-Command-Terminals fernsteuern.
KI-gestützte Vorbereitung
Die Zusammenarbeit zwischen NASA-Astronaut Jonny Kim an Bord der ISS und den Robotern auf dem simulierten Mars-Habitat in Oberpfaffenhofen lief so gut, dass in dem knappen Zeitfenster von zweieinhalb Stunden sämtliche Aufgaben einschließlich der Zusatzoptionen erfolgreich bewältigt wurden. So steuerte Jonny Kim den Rover manuell, um einen Probenbehälter zu greifen und in der Übergabestation abzulegen. Der US-Amerikaner steuerte die Roboter, um herumzufahren, sich umzusehen und die Umgebung zu erkunden, zu berühren und zu fühlen. In herausragender Weise setzte er sie als intelligente Mitarbeiter ein, die vor Ort Missionsaufgaben planen und ausführen. Sie dienten ihm als physische Verlängerung aus der Ferne – wie Avatare, ganz im Sinne der Mission.
Zur Vorbereitung nutzte der Astronaut den neuen KI-Assistenten, den Chatbot „Neal AI“, der auf einem großen Sprachmodell (Large Language Model, kurz LLM) des europäischen Anbieters Mistral AI basiert. Das Entwicklungsteam des Instituts für Robotik und Mechatronik hatte den Chatbot speziell für die Surface-Avatar-Mission trainiert. Während der Trainingsphase beantwortet er Jonny Kim Fragen zu den Funktionalitäten der Roboter, zur Bedienung der Steuerungseinheit und der Benutzungsoberfläche. Die Idee dahinter ist, dass bei künftigen Missionen zum Mars die Signalverzögerung zwischen Mars und Erde bis zu 40 Minuten betragen kann. Während dieser Kommunikationspausen zwischen Explorationsteam und Kontrollzentrum könnte ein KI-Assistent wie Neal AI Astronautinnen und Astronauten bei Fragen umgehend weiterhelfen.
Spitzenrobotik aus Deutschland und Europa
„Das letzte Experiment von Surface Avatar war der perfekte Abschluss der Mission. Sie zeigte, wie die Robotik unsere Astronautinnen und Astronauten bei der Erforschung des Weltraums unterstützen kann. Ich freue mich schon darauf, nach dieser fruchtbaren Zusammenarbeit mit der ESA, künftig auch weitere gemeinsame Erfolge zu feiern“, fasst Principal Investigator Neal Y. Lii vom Institut für Robotik und Mechatronik zusammen.
Zum Abschluss der Surface-Avatar-Reihe reichten sich NASA-Astronaut Jonny Kim und DLR-Wissenschaftler Neal Lii in Oberpfaffenhofen die Hand – mittels des Roboters Rollin‘ Justin, der per Kraftrückkoppelung die Kraft und Bewegung des Händeschüttelns beide Experimentpartnern spüren ließ. Ein emotionaler Moment, in der Technologie „made in Germany“ steckt. In der Regelungstechnik zur Kompensation der Zeitverzögerung im Weltraum ist Deutschland weltweit führend. So war dieser Tele-Handschlag auch eine passende Hommage an die gemeinsame Reise von DLR und ESA. Angetrieben durch die Entwicklungen im Bereich künstlicher Intelligenz wird die Robotik weiter neue Dimensionen für die Menschen eröffnen.




{kind=link}
{kind=link}
{kind=link}
