
Eine virtuelle Welt für ein reales Fahrgefühl

{kind=link}
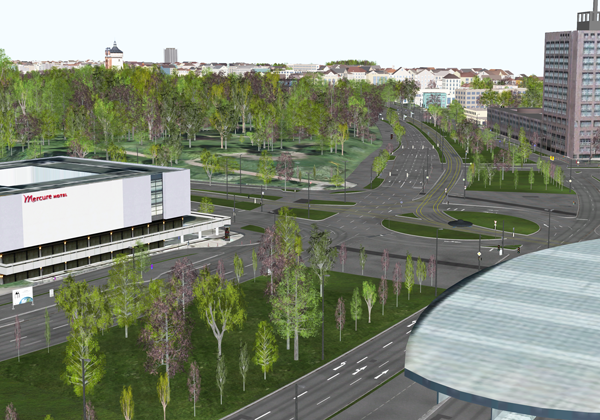
Seit über drei Jahren tüfteln die DLR-Wissenschaftler an dreidimensionalen Abbildern von Städten, um in der Simulation möglichst realitätsnahe Tests für automatisiertes Fahren durchführen zu können. Das Projekt nennt sich „Virtuelle Welt“ und ist in seiner Komplexität bisher einzigartig.
Die Entwicklung und das Testen von Fahrerassistenz- und Automationssystemen werden immer komplexer. Um möglichst kostengünstig und zeitsparend an diesen Systemen zu forschen, ist die Simulation der effizienteste Weg. Doch was nützt ein Highend-Simulator, wenn die Testumgebung darin kein realistisches Abbild der Fahrumgebung zeigt und Testpersonen sich dementsprechend nicht „natürlich“ verhalten werden? Aus diesem Grund haben sich die Wissenschaftler des DLR-Instituts für Verkehrssystemtechnik mit den Forschern des Deutschen Fernerkundungsdatenzentrums und dem DLR-Institut für Optische Sensorsysteme einer Aufgabe der Königsklasse angenommen: Die Erschaffung eines exakten dreidimensionalen Abbildes einer Stadt.
Braunschweig ist der Prototyp
Begonnen haben die Wissenschaftler mit der beispielhaften Generierung von Braunschweig. Mit einer Fläche von ca. 100 qkm ist die Stadt mit ihrer komplexen Infrastruktur und den unterschiedlichen Verkehrssituationen vergleichbar mit anderen deutschen Städten. Zudem betreibt das DLR mit der Anwendungsplattform Intelligente Mobilität (AIM) in Braunschweig bereits eine hochkarätige Großforschungsanlage zur Verkehrsforschung direkt in der Stadt. Mit Kommunikationstechnik ausgestattete Strecken und Kreuzungen, Forschungsbahnübergänge und Simulatoren liefern den Forschern bereits eine große Menge an Informationen.
Doch woher kommen die restlichen Daten, damit die virtuelle Umgebung hinterher auch perfekt dargestellt wird? „Ursprünglich haben wir gedacht, wir könnten die Straßen mittels Fernerkundungsbildern zusammensetzen“, erklärt der Projektleiter Andreas Richter. „Doch wir mussten schnell einsehen, dass das nicht reicht. Uns fehlten simple Dinge, wie die genaue Position der Straßenmarkierungen, Ampeln und Beleuchtungsanlagen. Alles, was einem während der Fahrt im Simulator das Gefühl gibt, dass man sich tatsächlich in einer Stadt befindet.“
Das Konzept ist auf jede Stadt übertragbar
Um die Stadt so genau wie möglich abzubilden, haben die Forscher den Braunschweiger Innenstadtring hochgenau vermessen und die restlichen Straßen samt ihrer Umgebung mit Katasterdaten, Informationen von Infrastrukturbetreibern, Luftbildern, Liegenschaftsdaten, digitalem Stadtmodell, Vermessungs- und Navigationsdaten und Crowd-Sourced-Daten aus OpenStreetMap kombiniert. „Je mehr Parameter wir wissen und nicht raten müssen, desto realistischer wird das Modell“, so Andreas Richter. Damit all diese Daten letztendlich auch ein möglichst genaues virtuelles Abbild liefern, haben die Wissenschaftler einen Ansatz entwickelt, der eine komplett automatisierte Werkzeugkette und einen einheitlichen digitalen Atlas mit all den gewonnenen Daten enthält. So müssen beispielsweise zu hoch dargestellte Verkehrsschilder nicht einzeln per Hand an die richtige Stelle gerückt werden - alles funktioniert automatisiert. Aus diesem Daten-Atlas heraus können die Forscher jetzt automatisch Straßenbeschreibungen und 3D-Modelle exportieren. „Die von uns entwickelte Werkzeugkette spart unglaublich viel Zeit und führt dazu, dass wir zukünftig auch in der Lage sind, jede beliebige Stadt oder sogar ganz Deutschland ohne großen Aufwand digital abzubilden, wenn die entsprechenden Daten vorhanden sind“, weiß Andreas Richter.

Für die Wiedergabe dieses Videos auf Youtube.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
Links
- Fusion heterogener Geodaten zur Erstellung realer 3D-Welten am Beispiel einer Fahrsimulation (Wissenschaftlicher Artikel)
- Developing a toolchain for providing automatically highly accurate 3D database (Wissenschaftlicher Artikel)
- Challenges and experiences in using heterogeneous, geo-references data for automativ creation of driving simulator environments (Wissenschaftlicher Artikel)
- Institut für Optische Sensorsysteme
- Earth Observation Center